Un circuit care permite unui motor conectat să funcționeze în sensul acelor de ceasornic și în sens invers acelor de ceasornic prin declanșatoare de intrare alternative se numește circuit de control bidirecțional.
Primul design de mai jos discută despre un circuit de control al motorului bidirecțional bazat pe punte completă sau pe punte H, folosind cele 4 opampuri de la IC LM324. În cel de-al doilea articol aflăm despre un circuit de control al motorului cu cuplu ridicat bidirecțional folosind IC 556
Introducere
În general, comutatoare mecanice sunt obișnuiți să regleze direcția de rotație a unui motor DC. Reglând polaritatea tensiunii utilizate și motorul se rotește în sens opus!
Pe de o parte, acest lucru poate avea dezavantajul că un comutator DPDT trebuie adăugat pentru a modifica polaritatea tensiunii, dar avem de-a face doar cu un comutator care face procedura destul de ușoară.
Cu toate acestea, DPDT poate avea o problemă gravă, nu este recomandat să inversați brusc tensiunea peste un motor DC în timpul mișcării sale de rotație. Acest lucru poate duce la o creștere a curentului, care ar putea arde controlerul de viteză asociat.
În plus, orice tip de solicitare mecanică poate provoca, de asemenea, probleme similare. Acest circuit bate cu ușurință aceste complicații. Direcția și viteza sunt manipulate cu ajutorul unui potențiometru solitar. Rotirea vasului într-o direcție specificată face ca motorul să înceapă să se rotească.
Comutarea potului în direcția opusă permite motorului să se rotească în mișcare inversă. Poziția de mijloc de pe oală oprește motorul, asigurându-se că motorul încetinește mai întâi și apoi se oprește înainte de a se face un efort de schimbare a direcției.
Specificatii tehnice
Voltaj: Circuitul și motorul utilizează sursa de alimentare comună. Acest lucru implică acest lucru, deoarece cea mai mare tensiune de lucru a LM324 este de 32VDC, acesta devine, de asemenea, tensiunea maximă accesibilă pentru a acționa motorul.
Actual: IRFZ44 MOSFET este proiectat pentru 49A, IRF4905 va fi capabil să se ocupe de 74A. Cu toate acestea, pistele PCB care rulează de la pinii MOSFET la blocul de borne cu șurub pot gestiona doar aproximativ 5A. Acest lucru ar putea fi îmbunătățit prin lipirea pieselor de sârmă de cupru peste pistele PCB.
În acest caz, asigurați-vă că MOSFET-urile nu devin prea fierbinți - dacă o fac, vor fi necesare radiatoare mai mari pentru a fi montate pe aceste dispozitive.
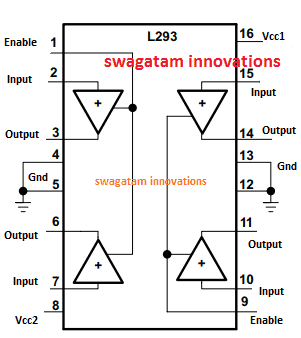
LM324 Pinouts

COMANDA BIDIRECȚIONALĂ A MOTORELOR DE CONTINU CU LM324
În principiu, veți găsi 3 moduri de a reglați viteza motoarelor de curent continuu :
1. Folosind unelte mecanizate pentru a atinge accelerația ideală: Această abordare depășește adesea confortul majorității entuziaștilor care practică în ateliere la domiciliu.
Două. Scăderea tensiunii motorului printr-un rezistor de serie. Acest lucru poate fi cu siguranță ineficient (puterea va fi disipată în rezistor) și, de asemenea, va duce la reducerea cuplului.
Curentul consumat de motor crește, de asemenea, pe măsură ce sarcina motorului crește. Creșterea curentului înseamnă o scădere mai mare a tensiunii peste rezistorul din serie și, prin urmare, o tensiune scăzută pentru motor.
Motorul face apoi un efort pentru a trage o cantitate mai mare de curent, determinând blocarea motorului.
3. Prin aplicarea întregii tensiuni de alimentare la motor în impulsuri scurte: Această metodă scapă de efectul de cădere a seriei. Aceasta este denumită modulare a lățimii impulsurilor (PWM) și este strategia găsită în acest circuit. Impulsurile rapide permit motorului să funcționeze lent impulsurile extinse permit motorului să funcționeze mai rapid.

CUM FUNCȚIONEAZĂ (consultați schema)
Circuitul ar putea fi împărțit în patru etape:
1. Comanda motorului - IC1: A
2. Generator de unde triunghiulare - IC1: B
3. Comparatoare de tensiune - IC1: C și D
4. Unitate motor - Q3-6
Să începem cu stadiul șoferului motor, centrat în jurul MOSFET-urilor Q3-6. Doar câteva dintre aceste MOSFET-uri rămân în starea activată în orice moment. În timp ce Q3 și Q6 sunt pornite, curentul se deplasează prin motor și îl determină să se rotească într-o singură direcție.
De îndată ce Q4 și Q5 sunt în stare de funcționare, circulația curentă este inversată și motorul începe să se rotească în direcția opusă. IC1: C și IC1: D se ocupă de MOSFET-urile pornite.
Opamps IC1: C și IC1: D sunt conectate ca comparatoare de tensiune. Tensiunea de referință pentru aceste opamps este produsă de divizorul de tensiune al rezistorului R6, R7 și R8.
Observați că tensiunea de referință pentru IC1: D este atașată la intrarea ‘+’, dar pentru IC1: C este cuplată la intrarea ‘-’.
Aceasta înseamnă că IC1: D este activat cu o tensiune mai mare decât cea de referință, în timp ce IC1: C este solicitat cu o tensiune mai mică decât cea de referință. Opamp IC1: B este configurat ca un generator de unde triunghiulare și furnizează semnalul de activare comparatoarelor de tensiune relevante.
Frecvența este aproximativ inversa constantei de timp de R5 și C1 - 270Hz pentru valorile utilizate.
Scăderea R5 sau C1 crește frecvența crescând oricare dintre acestea va reduce frecvența.
Prin urmare, este extrem de greu ca ambele comparatoare să fie activate în același timp. Sau altfel toate cele 4 MOSFET-uri ar începe să conducă, ducând la un scurtcircuit și distrugându-le pe toate.
Forma de undă triunghiulară este structurată în jurul unei tensiuni offset DC. Creșterea sau scăderea tensiunii de deplasare variază în mod adecvat poziția impulsului undei triunghiulare.
Comutarea valului triunghiului în sus permite comparatorului IC1: D să se activeze diminuând, rezultă activarea comparatorului IC1: C. Când nivelul de tensiune al undei triunghiulare se află în mijlocul celor două referințe de tensiune, atunci niciunul dintre comparatoare nu este indus. Tensiunea de offset DC este reglată de potențiometrul P1 prin IC1: A, care este proiectat ca un următor de tensiune.
Acest lucru oferă o sursă de tensiune de impedanță de ieșire scăzută, permițând tensiunii offset DC să fie mai puțin vulnerabilă la impactul de încărcare al IC1: B.
Pe măsură ce „potul” este comutat, tensiunea de decalare continuă începe să varieze, fie în sus, fie în jos, în funcție de direcția în care potul este rotit. Dioda D3 prezintă protecția inversă a polarității pentru controler.
Rezistorul R15 și condensatorul C2 sunt un filtru simplu de trecere. Aceasta este menită să curățe orice vârfuri de tensiune provocate de MOSFET-uri în timp ce pornesc alimentarea cu energie a motorului.
Lista de componente

2) Controlul motorului bidirecțional utilizând IC 556
Controlul vitezei și bidirecțional pentru motoarele de curent continuu este relativ simplu de implementat. Pentru motoarele cu energie independentă, viteza este, în principiu, o funcție liniară a tensiunii de alimentare Motoarele cu magnet permanent sunt o subcategorie a motoarelor cu energie independentă și sunt adesea utilizate în jucării și modele.
În acest circuit, tensiunea de alimentare a motorului variază prin intermediul modulației lățimii impulsurilor (PWM), care asigură o eficiență bună, precum și un cuplu relativ ridicat la turații mici ale motorului. O singură tensiune de control între 0 și +10 V permite inversarea turației motorului și variația de la zero la maxim în ambele direcții.
IC-ul multivibrator Astable este configurat ca un oscilator de 80 Hz și determină frecvența semnalului PWM. Sursa curentă T1 încarcă Ca. Tensiunea din dinte de ferăstrău de-a lungul acestui condensator este comparată cu tensiunea de control din 1C2, care transmite semnalul PWM către tamponul N1-Na sau NPN1. Driverul de motor bazat pe Darlington este un circuit de pod care poate conduce sarcini de până la 4 Amperi, cu condiția ca curentul de intrare să rămână sub 5 Amperi și să fie asigurată o răcire suficientă pentru tranzistoarele de putere T1 -T. Diodele D1, D5 oferă protecție împotriva supratensiunilor inductive de la motor Comutatorul S1 face posibilă inversarea direcției motorului instantaneu.

Imagini prototip



Precedent: Înțelegerea circuitelor amplificatorului În continuare: Cum să conectați tranzistoarele (BJT) și MOSFET cu Arduino