
Introducere în sistemele încorporate
Sistemul în care scopul dedicat al software-ului este încorporat într-un design hardware este cunoscut sub numele de sistem încorporat. Acest sistem poate fi fie un sistem independent, fie un sistem mai mare. Software-ul este de obicei încorporat în module de memorie ca ROM și nu are nevoie de memorie secundară ca la un computer. Telecomunicații, carduri inteligente, rachete, rețele de calculatoare, electronice digitale de consum iar sateliții sunt unele dintre aplicațiile sistemelor încorporate.

Aplicații de sisteme încorporate
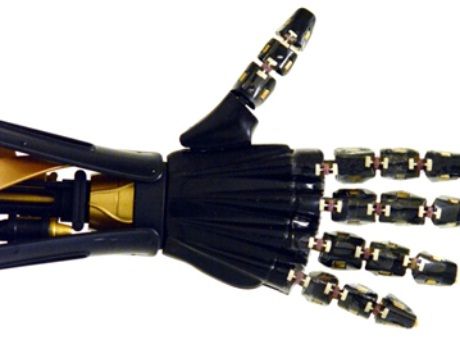
Aplicații de sisteme încorporate includ robotică, cameră digitală, jucării multi-tasking, sisteme de gătit și spălare, sisteme biomedicale, controlere de tastatură, telefoane mobile și inteligente, sisteme de calcul, sistem electronic de afișare a greutății inteligente și sisteme de divertisment, cum ar fi videoclipuri, jocuri, sistem muzical și jocuri video și așa mai departe.
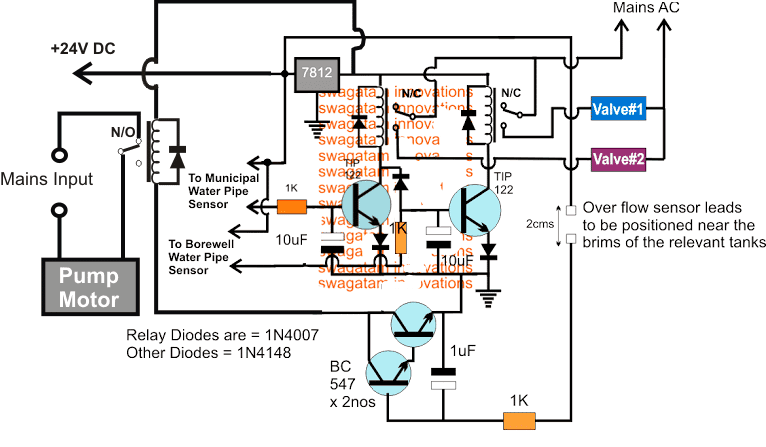
Proces de proiectare a sistemului încorporat se poate face mai întâi prin simulare, care este utilizată pentru testarea circuitului, deoarece schimbarea hardware-ului devine foarte dificilă dacă circuitul nu funcționează corect. Dacă rezultatele sunt potrivite cu cele dorite, procesul va fi proiectat permanent prin procese secvențiale de napolitane.
Bazele sistemelor încorporate
Sistemele încorporate sunt proiectate pentru a îndeplini sarcini specifice, dar nu pot fi utilizate ca computere cu scop general pentru a efectua sarcini diferite. Software-ul pentru sistemul încorporat este denumit în mod normal firmware, care poate fi stocat într-un disc sau într-un singur cip. Cele două elemente principale ale sistemelor sunt:
- Hardware de sistem încorporat
- Software de sistem încorporat

Hardware și software de sistem încorporat
Hardware de sistem încorporat : Un sistem încorporat necesită o platformă hardware pentru a interacționa cu diverse intrări și ieșiri sau variabile în timp real. Hardware-ul include controler, cum ar fi microcontroler sau microprocesor , module de memorie, interfețe I / O, sisteme de afișare și module de comunicații etc.
Software de sistem încorporat : Acest software permite programarea în modul dorit, astfel încât să controleze diferite operațiuni. Este scris într-un format de nivel înalt, compilat în cod și apoi aruncat în controlere hardware.
Sisteme încorporate în timp real sunt sisteme informatice care efectuează acțiuni, cum ar fi monitorizarea, răspunsul și controlul mișcării externe. Mediul extern este conectat la sistemul computerizat prin intermediul senzori , actuatoare și interfețe I / O. Un sistem informatic real încorporat cu un sistem informatic este cunoscut sub numele de sistem încorporat în timp real. Un sistem încorporat în timp real este utilizat în diferite domenii, cum ar fi sectoarele militar, guvernamental și medical.
Proiecte robotizate în timp real în sisteme încorporate
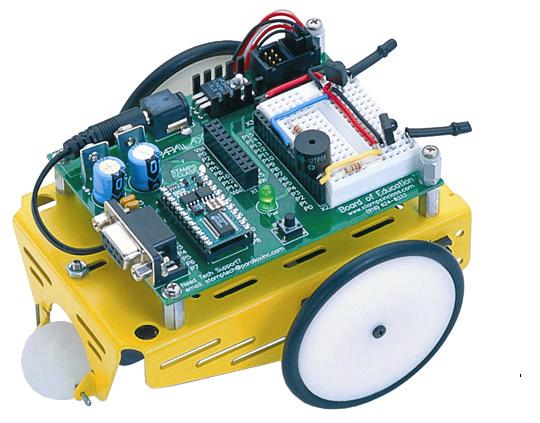
Sisteme integrate poate fi utilizat în multe dintre aplicațiile în timp real, cum ar fi automobile, robotică, industrii etc. Următoarele proiectele în timp real sunt legate de tehnologia robotică .
1. Vehicul robot controlat prin voce cu recunoaștere a vorbirii pe distanțe lungi
Scopul acestui proiect este de a controla un vehicul robotizat prin comenzi vocale pentru operare la distanță. Un 8051 microcontroler este utilizat cu un modul de recunoaștere a vorbirii pentru a efectua operația dorită. Folosește un microcontroler 8051, un modul de recunoaștere a vorbirii, un buton, un modul RF, un codificator, un decodor, un IC pentru driverul motorului, motoare de curent continuu, baterii și alte componente diverse.

Transmitator de vehicule robotizate controlate prin voce
Mișcările vehiculului, cum ar fi stânga, dreapta, sus și jos, pot fi efectuate utilizând butoane sau comenzi vocale printr-un modul de recunoaștere a vorbirii care este interfațat cu microcontrolerul. Aici, un codificator este utilizat pentru a codifica comenzile date microcontrolerului prin utilizarea transmițătorul RF pentru a transmite semnalele la frecvența de 433 MHz.
Prin urmare, când semnalele care apar prin apăsarea butoanelor sau semnale de comandă vocală corespunzătoare mișcării sunt recepționate de microcontroler, acesta trimite semnale de control către circuitul receptorului prin modulul transmițător.

Receptor de vehicule robotice controlate prin voce
La primirea acestor semnale, un receptor RF transmite acele semnale către un circuit de decodor în care datele binare sunt convertite într-un semnal la nivel de microcontroler. Prin urmare, microcontrolerul efectuează mișcarea dorită din circuitul emițătorului. Modulul laser este interfațat cu microcontrolerul pentru detectarea operațiunilor efectuate de robot chiar și în locuri întunecate.
2. Vehicul robot controlat de la distanță pe ecran tactil pentru gestionarea magazinului
Acest proiect presupune controlul unui vehicul robotizat folosind un ecran tactil unitate pentru operare la distanță. Un panou cu ecran tactil este plasat la capătul emițătorului și a robot pick-n-place este plasat la capătul receptorului pentru a efectua o sarcină răspunzând semnalelor. Componentele hardware utilizate în acest proiect includ un microcontroler 8051, un panou cu ecran tactil, antene (partea transmițător-receptor), un codificator, un decodor, motoare de curent continuu, un corp robotizat, o baterie etc.

Transmițător robotizat pe bază de ecran tactil
Așa cum sa discutat în modulul de recunoaștere a vorbirii din proiectul de mai sus, în acest proiect, de asemenea, un modul cu ecran tactil trimite semnalele de control corespunzătoare mișcării vehiculului către microcontroler. Controlerul trimite ulterior aceste semnale către codificator și apoi către emițătorul care transmite în cele din urmă semnalele către circuitul receptorului.

Receptor de vehicule robotizat bazat pe ecran tactil
Antena plasată la capătul receptorului primește semnalele RF de la antena de transmisie și decodează datele și apoi le trimite la microcontroler. Acest set are patru motoare interfațate cu microcontrolerul: două motoare pentru mișcarea brațului și a mânerului și celelalte două pentru mișcarea corpului. Toate aceste motoare sunt acționate de un driver IC care primește continuu comenzile de la microcontroler.
Acestea sunt cele două aplicații de sisteme încorporate în domeniul roboticii. Exemplele în timp real ale sistemelor încorporate ar fi putut să vă ofere o mai bună înțelegere a conceptului de sisteme încorporate. Dacă aveți alte îndoieli cu privire la implementarea acestor proiecte, ne puteți contacta comentând mai jos.
Credite foto
- Aplicații de sisteme încorporate oocities
- Hardware și software de sistem încorporat dca-design









{kind=link}