Acest versatil controler de motor fără perii (BLDC) IC este prevăzut pentru a controla orice motor BLDC trifazat cu senzor de înaltă tensiune, curent ridicat, cu efect Hall, cu precizie și siguranță extremă. Să învățăm detaliile în profunzime.

Utilizarea IC MC33035
„Eroul” circuitului este controlerul cu un singur cip MC33035, care este un modul IC de înaltă performanță de a doua generație, care conține toate funcțiile active necesare care pot fi necesare pentru a rula cel mai mare curent, înaltă tensiune, trifazat sau 4-fază BLDC motoare cu buclă deschisă sau configurație cu buclă închisă.

IC-ul este echipat cu un decodor de poziție a rotorului pentru a permite o secvențiere de comutare precisă, referință compensată de temperatură pentru a facilita tensiunea corectă a senzorului, un oscilator programabil din dinte de ferăstrău, trei trepte de colector deschis încorporate în partea înaltă a conducătorului auto și trei polii totem drivere de tip low-side, proiectate special pentru a opera o etapă a controlerului de motor mosfet trifazat cu pod H de mare putere.
Cipul este, de asemenea, consolidat intern cu caracteristici de protecție extrem de ridicate și etape de control infailibile, cum ar fi blocarea sub tensiune, limitarea curentului ciclu-ciclu printr-o opțiune de oprire reglabilă cu închidere blocată, oprire internă la temperatură înaltă a IC și o concepere exclusivă pinout de ieșire de eroare care poate fi interfațat cu un MCU pentru o procesare avansată preferată și feed-back-uri.
Funcțiile tipice care pot fi executate cu acest IC sunt, controlul vitezei buclei deschise, controlul direcției inversă înainte, „activare funcționare”, o caracteristică de frânare dinamică de urgență.
IC-ul este conceput pentru a funcționa cu senzori de motor care au faze de la 60 la 300 de grade sau de la 120 la 240 de grade, drept bonus IC-ul poate fi folosit și pentru controlul motoarelor tradiționale periate.
Cum funcționează IC
MC33035 se numără printre mai multe controlere de motor DC fără perii de înaltă eficiență create de Motorola .
Este alcătuit din aproape capabilitățile necesare pentru a iniția un sistem complet de funcționare, cu buclă deschisă, trifazat sau cu patru faze.
În plus, controlerul poate fi realizat pentru a controla motoarele de perii DC. Proiectat cu tehnologie analogică bipolară, acesta oferă un nivel superior de eficiență și durabilitate într-un mediu industrializat nemilos.
MC33035 poartă un decodor de poziție a rotorului pentru secvențierea precisă a comutării, o referință rambursată de mediu competentă să furnizeze o putere a senzorului, un oscilator din dinți de ferăstrău programabil în frecvență, un amplificator de eroare complet accesibil, un comparator modulator de lățime a impulsurilor, 3 ieșiri de pe unitatea colectorului deschis și 3 Ieșirea driverului inferior totem pol de curent ridicat este potrivită pentru MOSFET-uri de putere de operare.
Încorporate în MC33035 sunt capabilități de ecranare care includ blocarea subtensiunii, limitarea curentului ciclu cu ciclu cu un mod de oprire selectată cu închidere cu întârziere, oprire termică încorporată, împreună cu o ieșire exclusivă de eroare care va fi interfațată convenabil cu un controler de microprocesor.
Atributele standard de control ale motorului încorporează controlul vitezei buclei deschise, rotația înainte sau înapoi, activarea funcționării și frânarea dinamică. În plus, MC33035 are un pin de selectare de 60 ° / 120 ° care configurează decodorul de situație a rotorului pentru intrările de fază electrică ale senzorilor de 60 ° sau 120 °.

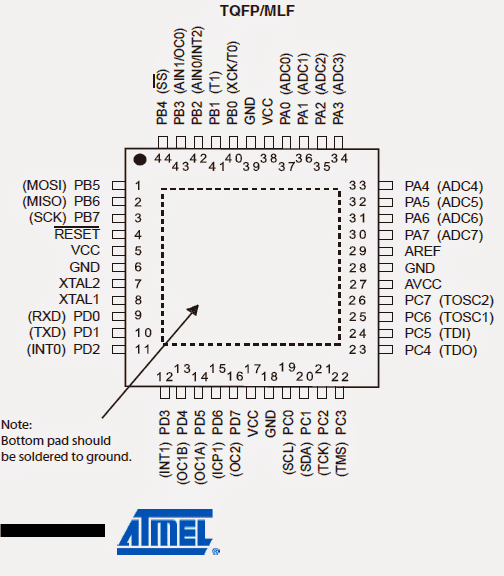
Funcții PIN OUT:
Pin1, 2, 24 (Bt, At, Ct) = Acestea sunt cele trei ieșiri superioare ale unității IC specificate pentru a opera dispozitivele de alimentare configurate extern, cum ar fi BJT-urile. Aceste pinouts sunt configurate intern ca mod colector deschis.
Pin # 3 (Fwd, Rev) = Acest pinout este destinat să fie utilizat pentru controlul direcției de rotație a motorului.
Pinul # 4, 5, 6 (Sa, Sb, Sc) = Acestea sunt 3 ieșiri ale senzorului IC alocate pentru a comanda secvența de control a motorului.
Pinul 7 (Activare ieșire) = Acest pin al IC-ului este atribuit pentru a permite funcționarea motorului atâta timp cât o logică înaltă este menținută aici, în timp ce o logică scăzută este pentru a permite o deplasare a motorului.
Pinul 8 (ieșire de referință) = Acest pin este activat cu un curent de alimentare pentru încărcarea condensatorului de sincronizare oscilator Ct, precum și pentru a oferi un nivel de referință pentru amplificatorul de eroare. Poate fi, de asemenea, utilizat pentru alimentarea cu energie a circuitelor IC ale senzorului de efect Hall.
Pinul # 9 (Intrare fără inversare Current Sense) : Ieșirea semnalului de 100mV poate fi realizată din acest pinout cu referință la pinul 15 și este utilizată pentru anularea conducției comutatorului de ieșire în timpul unui ciclu de oscilator specificat. Acest pinout se leagă în mod normal cu partea superioară a rezistorului de detectare a curentului.
Pin # 10 (Oscilator) : Acest pinout determină frecvența oscilatorului pentru IC cu ajutorul rețelei RC Rt și Ct.
Pinul # 11 (Eroare intrare fără inversare) : Acest pinout este utilizat cu potențiometrul de control al vitezei.
Pinul 12 (Eroare la inversarea intrării) : Acest pin este conectat intern cu ieșirea amplificatorului de eroare menționată mai sus pentru activarea aplicațiilor în buclă deschisă .
Pin # 13 (ieșire amplificator eroare / intrare PWM) : Funcția acestui pinout este de a oferi compensare în timpul aplicațiilor cu buclă închisă.
Pinul 14 (ieșire defectă) : Această ieșire a indicatorului de defecțiune poate deveni o logică activă scăzută în câteva condiții critice, cum ar fi: Cod de intrare nevalid pentru senzor, Activare pinout alimentat cu o logică zero, Pinout de intrare de sens curent devine mai mare de 100mV (@ pin9 cu referință la pin15) , declanșarea blocării sub tensiune sau a unei situații de oprire termică).
Pinul # 15 (intrare de inversare a sensului curent) : Acest pin este setat pentru furnizarea nivelului de referință pentru pragul intern de 100mV și poate fi văzut conectat cu rezistorul de detectare a curentului lateral inferior.
Pin # 16 (GND) : Acesta este pinul de masă al IC-ului și este destinat să furnizeze semnalul de masă circuitului de comandă și trebuie să fie trimis înapoi la masa sursei de alimentare.
Pin # 17: (Vcc) : Acesta este pinul pozitiv de alimentare specificat pentru a furniza tensiunea pozitivă la circuitul de control al CI. Gama minimă de funcționare a acestui pin este de 10V și maxima la 30V.
Pin # 18 (Vc) : Acest pinout setează starea înaltă (Voh) pentru ieșirile inferioare ale unității prin puterea atribuită acestui pin. Scena funcționează cu intervalul de la 10 la 30V.
Pin # 19, 20, 21 (Cb, Bb, Ab) : Aceste trei pinouts sunt aranjate intern sub formă de ieșiri totem pol și sunt atribuite pentru a conduce dispozitivele de putere de ieșire a unității inferioare.
Pin # 22 (60 D, 120D selectare schimbare de fază) : Starea atribuită acestui pinout configurează funcționarea circuitului de control cu senzorii de efect Hall pentru intrări cu unghi de fază de 60 grade (logică înaltă) sau 120 grade (logică scăzută).
Pinul 23 (frână) : O logică scăzută la acest pinout va permite motorului BLDC să funcționeze lin, în timp ce o logică înaltă va opri instantaneu funcționarea motorului printr-o decelerare rapidă.
DESCRIERE FUNCȚIONALĂ
O diagramă bloc internă reprezentativă este demonstrată în figura de mai sus. Un discurs despre beneficiile și funcționarea fiecăruia dintre blocurile centrale enumerate mai jos.
Decodor de poziție a rotorului
Un decodor de poziție a rotorului interior măsoară cele 3 intrări ale senzorului (pinii 4, 5, 6) pentru a reda secvențierea corectă a pinouturilor superioare și inferioare ale unității. Intrările senzorului sunt fabricate pentru a interacționa direct cu comutatoare de tip Hall cu efect colector deschis sau cuplaje cu fante opto.
Rezistențele de tragere încorporate sunt clasificate pentru a reduce cantitatea necesară de piese externe. Intrările sunt compatibile TTL, cu pragurile lor caracteristice la 2,2 V.
Gama de circuite integrate MC33035 este destinată controlului motoarelor trifazate și funcționării cu 4 dintre cele mai populare convenții de fazare a senzorilor. O selecție de 60 ° / 120 ° (pinul 22) este livrată rapid și furnizează MC33035 pentru a se configura singur pentru a regla motoarele care au fie fazarea senzorului electric de 60 °, 120 °, 240 ° sau 300 °.
Cu 3 intrări de senzori veți descoperi 8 formațiuni potențiale de coduri de intrare, dintre care 6 sunt plasamente legitime ale rotorului.
Celelalte două coduri sunt învechite, deoarece sunt în general rezultatul unei conexiuni deschise sau scurtcircuitate a senzorului.
Cu 6 coduri de intrare justificate, decodorul poate avea grijă de poziția rotorului motorului într-un spectru de 60 de grade electrice.
Intrarea Forward / Reverse (Pinul 3) este utilizată ca instrument pentru a modifica cursul programului motorului prin inversarea tensiunii pe înfășurarea statorului.
De îndată ce intrarea modifică starea, de la mare la scăzut utilizând un cod al programului de intrare al senzorului atribuit (de exemplu 100), ieșirile facilitate ale unității superioare și de bază care utilizează aceeași stare alfa sunt schimbate (AT la AB, BT la BB, CT la CB).
În esență, șirul modificabil este schimbat direcția și motorul inversează secvența direcțională. Controlul pornirii / opririi motorului se realizează prin activarea ieșirii (pinul 7).
Ori de câte ori este lăsat deconectat, o sursă internă de curent de 25 μA permite secvențierea ieșirilor de acționare de bază și de bază. Când sunt împământate, ieșirile de pe partea superioară se opresc și unitățile de bază sunt împinse la nivel scăzut, evocând motorul spre coastă și ieșirea de eroare pentru a declanșa.
Frânarea dinamică a motorului face posibilă dezvoltarea unei marje de protecție excedentare în dispozitivul final. Sistemul de frânare este realizat prin plasarea frânei (pinul 23) într-o stare superioară.
Acest lucru duce la ieșirea ieșirilor superioare ale unității și la activarea unităților inferioare, scurtcircuitând EMF generat din nou de motor. Intrarea de frână are o considerație absolută, din toată inima, față de toate celelalte intrări. Rezistența de tracțiune interioară de 40 kΩ se interconectează folosind comutatorul de siguranță al programului, garantând activarea frânei în cazul deschiderii sau opririi.
Tabelul adevărului logicii de comutare este prezentat mai jos. O poartă NOR cu 4 intrări este utilizată pentru a examina intrarea frânei și intrările la cele 3 ieșiri superioare BJT.

Obiectivul este de obicei oprirea frânării înainte ca ieșirile superioare ale unității să atingă un statut ridicat. Acest lucru vă permite să evitați închirierea sincronizată a comutatoarelor superioare și de bază.
În programele de acționare a motorului cu jumătate de undă, componentele de acționare de sus nu sunt în general necesare și, în majoritatea cazurilor, sunt ținute detașate. Cu aceste tipuri de circumstanțe, frânarea va fi încă atinsă, deoarece poarta NOR detectează tensiunea de bază la ieșirea superioară BJTs.
Amplificator de erori
Un amplificator de eroare îmbunătățit, complet compensat, cu acces activ la fiecare intrare și ieșire (pini # 11, 12, 13) este oferit pentru a ajuta la executarea controlului vitezei motorului cu buclă închisă.
Amplificatorul vine cu un câștig de tensiune DC standard de 80 dB, lățime de bandă de câștig de 0,6 MHz, împreună cu o gamă largă de tensiune în modul comun de intrare, care se întinde de la sol la Vref.
În majoritatea programelor de control al vitezei în buclă deschisă, amplificatorul este configurat ca un adept de tensiune de câștig de unitate cu intrarea neinversibilă cuplată la sursa de tensiune setată de viteză.
Oscilator Frecvența oscilatorului de rampă internă este cablată prin valorile stabilite pentru elementele de sincronizare RT și CT.
Condensatorul CT va fi încărcat prin ieșirea de referință (pinul 8) prin intermediul rezistorului RT și descărcat printr-un tranzistor de descărcare interior.
Tensiunile de vârf și de groapă ale rampei sunt în mod normal 4,1 V și 1,5 V corespunzător. Pentru a oferi un scor decent între zgomotul audibil și performanța de comutare a ieșirii, este sugerată o frecvență a oscilatorului în selecția de 20 până la 30 kHz. Faceți referire la Figura 1 pentru selectarea componentelor.
Modulator de lățime a impulsurilor
Modulația integrată a lățimii impulsurilor oferă o abordare eficientă a puterii pentru a regla viteza motorului prin modificarea tensiunii standard atribuite fiecărui înfășurare a statorului de-a lungul seriei de comutație.
Pe măsură ce descărcările CT, oscilatorul modelează fiecare zăvor, permit conducerea ieșirilor superioare și inferioare ale unității. Comparatorul PWM resetează zăvorul superior, terminând leasingul de ieșire al unității inferioare, odată ce rampa pozitivă a CT se transformă în exces față de rezultatul amplificatorului de eroare.
Diagrama de sincronizare a impulsului-lățime-modulator este demonstrată în Figura 21.
Modulația lățimii impulsurilor pentru gestionarea vitezei se prezintă exclusiv la ieșirile inferioare ale unității. Limita de curent Funcționarea constantă a unui motor care poate fi supraîncărcat semnificativ duce la supraîncălzire și la disfuncționalități inevitabile.
Această situație dăunătoare poate fi evitată cel mai bine împreună cu utilizarea restricției de curent ciclu cu ciclu.
Adică, fiecare ciclu este tratat ca fiind o funcție independentă. Restricția curentului ciclu cu ciclu se realizează prin urmărirea acumulării curentului statorului de fiecare dată când se declanșează un comutator de ieșire și, după ce detectați o situație de curent ridicat, dezactivați instantaneu comutatorul și îl rețineți pentru perioada remarcabilă a intervalului de rampă a oscilatorului.
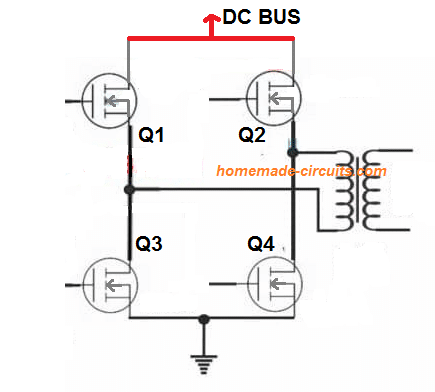
Curentul statoric este transformat într-o tensiune prin aplicarea unui rezistor de detectare RS la care se face referință la sol (Figura 36), în linie cu cele 3 tranzistoare de comutare a părții inferioare (Q4, Q5, Q6).
Tensiunea stabilită de-a lungul rezistenței anticipate este supravegheată cu intrarea de detectare a curentului (pinii 9 și 15) și comparată cu punctul de referință interior de 100 mV.
Intrările curente ale comparatorului de sens vin cu o gamă de mod comun de intrare de aproximativ 3,0 V.
În cazul în care se depășește toleranța de detectare a curentului de 100 mV, comparatorul resetează blocarea senzorială inferioară și termină conducerea comutatorului de ieșire. Valoarea rezistorului de detectare curent este de fapt:
Rs = 0,1 / Istator (max)
Ieșirea de eroare se inițiază în timp ce se află într-o situație de amplificator mare. Setarea dual-latch PWM asigură faptul că un singur impuls de declanșare a unei singure ieșiri apare în cursul unei anumite rutine de oscilator, indiferent dacă se termină sau nu prin ieșirea amplificatorului de eroare sau a comparatorului de limită de curent.
Regulatorul on-chip de 6,25 V (Pinul 8) oferă curent de încărcare pentru condensatorul de sincronizare a oscilatorului, un punct de referință pentru amplificatorul de eroare, care îi permite să furnizeze 20 mA de curent adecvat pentru alimentarea specifică a senzorilor în programele de joasă tensiune.
În scopuri de tensiune mai mare, acest lucru ar putea deveni important pentru a schimba puterea emisă de regulator de pe IC. Acest lucru se realizează cu siguranță cu ajutorul unui alt tranzistor de trecere, așa cum se arată în Figura 22.
Un punct de referință de 6,25 V pare să fie decis pentru a permite redarea circuitului NPN direct, oriunde Vref - VBE depășește tensiunea minimă esențială de senzorii Hall Effect la căldură.
Având un sortiment adecvat de tranzistori și o radiere suficientă, poate fi achiziționat până la 1 amp de curent de sarcină.
Sub-tensiune-blocare
Un blocaj de subtensiune în trei direcții a fost integrat pentru a reduce daunele la IC și la tranzistoarele alternative ale comutatorului de alimentare. În timpul factorilor de alimentare cu energie redusă, asigură faptul că IC-ul și senzorii sunt complet funcționali și că există o tensiune de ieșire adecvată a unității de bază.
Sursele de alimentare pozitive către IC (VCC) și unitățile reduse (VC) sunt examinate fiecare de comparatoare independente care își ating pragurile la 9,1 V. Această etapă specială garantează o deplasare adecvată a porții necesare pentru a obține un RDS scăzut (pornit) ori de câte ori conduceți o putere obișnuită Echipamente MOSFET.
Ori de câte ori alimentați direct senzorii Hall de la referință, apare o funcționare necorespunzătoare a senzorului în cazul în care tensiunea de ieșire a punctului de referință scade sub 4,5 V.
Un al treilea comparator poate fi folosit pentru a recunoaște această problemă.
Când mai mult de unul dintre comparatoare detectează o situație de subtensiune, ieșirea de eroare este activată, cursele superioare sunt oprite și ieșirile de bază ale unității sunt organizate într-un punct scăzut.
Fiecare dintre comparatoare încorporează histerezis pentru a proteja împotriva amplitudinilor atunci când își acoperă pragurile individuale.
Ieșire defecțiune
Ieșirea defectă a colectorului deschis (pinul 14) a fost destinată să ofere detalii de analiză în cazul unei defecțiuni a procesului. Are o capacitate de curent de 16 mA și poate conduce în mod specific o diodă emițătoare de lumină pentru semnal vizibil. Mai mult, este de fapt convenabil interfațat cu logica TTL / CMOS pentru utilizare într-un program guvernat de microprocesor.
Ieșirea de eroare este eficientă în timp ce au loc mai multe situații ulterioare:
1) Coduri de intrare senzor nevalide
2) Activare ieșire la logică [0]
3) Intrare de detectare a curentului mai mare de 100 mV
4) Blocare subtensiune, activarea a 1 sau mai mare dintre comparatoare
5) Oprire termică, temperatura optimă de joncțiune maximă Această ieșire exclusivă poate fi utilizată și pentru a distinge între pornirea motorului sau funcționarea rezistentă într-o situație inundată.
Cu ajutorul unei rețele RC între ieșirea de defecțiune și intrarea de activare, aceasta înseamnă că puteți dezvolta o oprire cu blocare temporizată în ceea ce privește supracurentul.
Circuitele suplimentare afișate în Figura 23 ajută la pornirea fără efort a sistemelor de motoare care sunt echipate cu sarcini inerțiale mai mari, oferind un cuplu suplimentar de preluare, protejând în același timp siguranța la supracurent. Această sarcină este realizată prin plasarea restricției curente la următoarea valoare minimă pentru o perioadă stabilită. În timpul unei situații de supracurent extrem de lungi, condensatorul CDLY se va încărca, evocând intrarea de activare pentru a-și trece toleranța la o stare scăzută.
Un zăvor poate fi acum modelat de ciclul de feedback pozitiv de la ieșirea defectă la activarea ieșirii. Când este setat, de la Current Sense Input, acesta poate fi resetat doar prin scurtcircuitarea CDLY sau ciclarea surselor de alimentare.
Schema BLDC complet funcțională de înaltă putere
Un circuit de control BLDC de înaltă putere și curent complet funcțional, care utilizează dispozitivul explicat mai sus, poate fi observat mai jos, este configurat ca un mod cu 3 faze, cu 6 faze, cu undă completă:

Precedent: Calculul tensiunii, curentului într-un inductor Buck Următorul: Realizați acest circuit de scuter electric / Rickshaw