Articolul discută despre un circuit simplu de control la distanță cu infraroșu (IR), care este configurat pentru acționarea unui motor DC ca răspuns la comutarea efectuată de la un receptor IR standard, cum ar fi o telecomandă TV sau o telecomandă DVD.
Motorul conectat poate fi deplasat în ambele sensuri și poate fi oprit.
Circuitul poate fi înțeles cu următoarele explicații:
Cum functioneaza
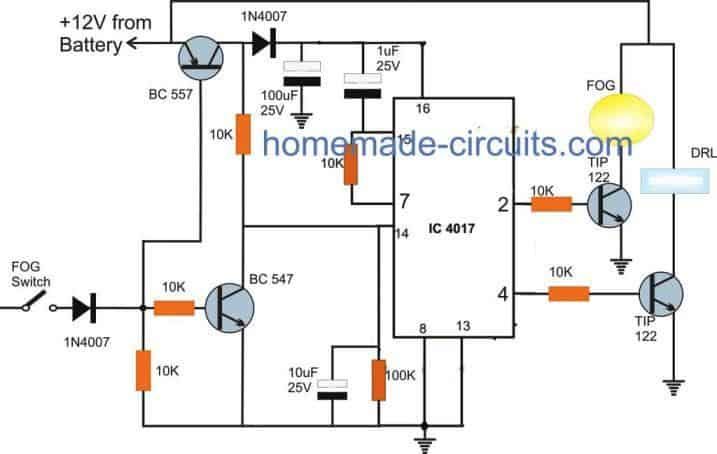
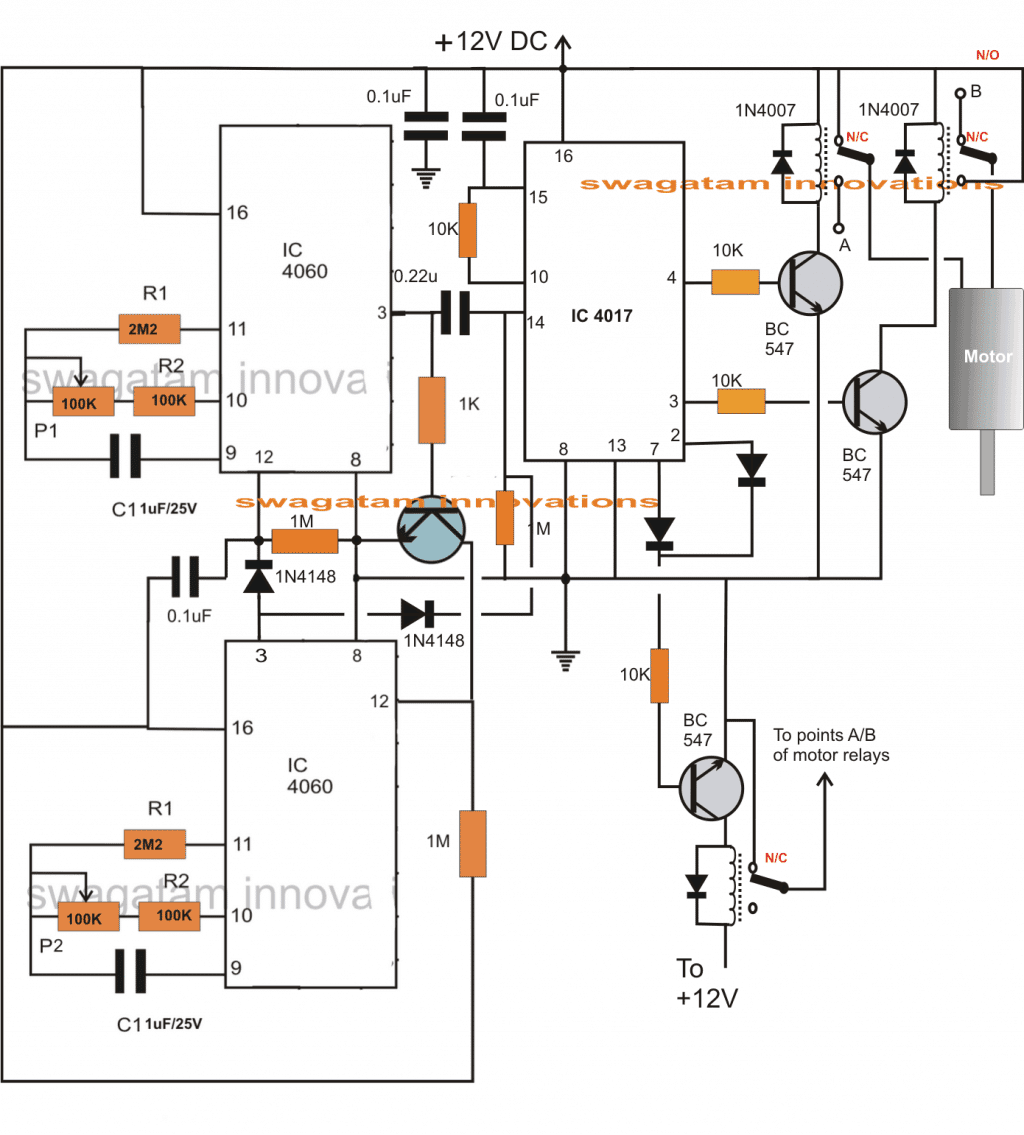
Așa cum se poate vedea în schema de circuit dată, senzorul este un modul senzor standard cu trei pini IR care ar răspunde în mod obișnuit oricărui receptor TV de la distanță IR.
Când un fascicul IR (infraroșu) este focalizat către senzor, pinul care este desemnat ca ieșire devine logic scăzut. Această situație persistă atâta timp cât fasciculul rămâne focalizat spre ea.
Tranzistorul T1, care este un PNP, răspunde la acest semnal logic slab și conduce comutarea releului RL1 atașat.
Contactele conectează instantaneu potențialul pozitiv instantaneu la colectorul tranzistorului la pinul 14 al IC1, care este conectat ca un circuit flip flop.
Presupunând că secvența logică inițială este la pinul 3 al IC-ului, declanșarea de mai sus mută secvența la pinul 2 al IC-ului, făcându-l ridicat.
Aceasta pornește T2 și releul corespunzător RL2.
RL2 conduce și conectează firul particular al motorului la alimentarea negativă. Deoarece celălalt terminal al motorului devine pozitiv de la RL3, acesta începe să se deplaseze pe direcția stabilită.
Acum, să presupunem că senzorului i se dă o declanșare ulterioară prin receptorul de la distanță IR, procesul de mai sus se repetă și secvența de ieșire se schimbă de la pinul 2 la pinul 4 al IC1, care pornește instantaneu T3 în timp ce oprește T2.
Acțiunea de mai sus inversează conexiunile releului, forțând motorul să inverseze instantaneu direcția de rotație.
Cu un alt declanșator ulterior de la receptorul de la distanță, secvența revine înapoi la pinul 3, care nu este conectat la nimic și are ca rezultat oprirea completă a motorului.
Includerea L1, C1 asigură faptul că circuitele nu sunt influențate de declanșarea falsă a senzorului.
L1 poate fi experimentat pentru a obține valoarea optimă, astfel încât să „împiedice” doar semnale externe accidentale și nu semnalele IR reale de la un receptor de telecomandă.


Lista pieselor pentru circuitul motorului cu telecomandă IR (infraroșu) de mai sus.
R1 = 100 ohmi,
R2 = 1K
R3, R4, R5, R6, R7 = 10K
C1, C4, C6 = 100uF / 25V
C2, C3, C7 = 0,22uF
C5 = 1000uF / 25V
C6 = 0,22uF
L1 = 100mH sufocator
T1 = BC557
T2, T3 = BC547
D1 --- D7 = 1N4007
IC1 = IC4017
IC2 = 7812
Toate relele = 12V / 400 ohmi / SPDT
senzor = TSOP1738
Motor = motor 12V DC
Precedent: Utilizarea unui termistor NTC ca supresor de supratensiune Următorul: Circuitul compact de alimentare MJE13005 220V
![Circuit convertizor de 24 V la 12 V CC [folosind regulator de comutare]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)