În această postare investigăm specificațiile tehnice și detaliile de identificare ale IC L293, care este un IC versatil cu șofer cu jumătate de H, care poate fi utilizat pentru implementarea multor motoare interesante. circuit bazat pe driver aplicații, cum ar fi pentru funcționarea motoarelor, solenoidelor și a altor sarcini inductive (4 unități separate sau în perechi prin modul push-pull).
Cum functioneaza
IC L293 include în principiu două perechi de ieșiri care pot fi utilizate independent pentru operarea a două sarcini separate într-un mod push pull sau într-un mod bidirecțional, denumit și modul totem pol. Alternativ, aceste perechi de ieșiri pot fi individuale utilizat pentru operarea a 4 sarcini individuale într-o manieră unidirecțională.
Operațiunile de mai sus ale sarcinilor sunt controlate prin pinouturile de intrare corespunzătoare, declanșate dintr-un circuit oscilator extern sau un Sursa PWM .
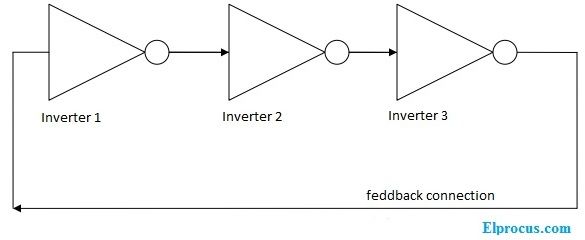
De exemplu, dacă sarcina trebuie să fie acționată într-un mod totem, intrările corespunzătoare ale celor două trepte ale driverului IC-ului ar putea fi declanșate de la un dispozitiv extern oscilator, cum ar fi prin câteva porți NAND , în care o poartă ar putea fi conectată ca oscilator în timp ce cealaltă ca invertor.
Cele două semnale antifazice de la acestea Porți NAND atunci ar putea fi conectat cu intrările L293 pentru operarea ieșirilor relevante într-un mod totem (push-pull), care la rândul său ar rula sarcina conectată în același mod.
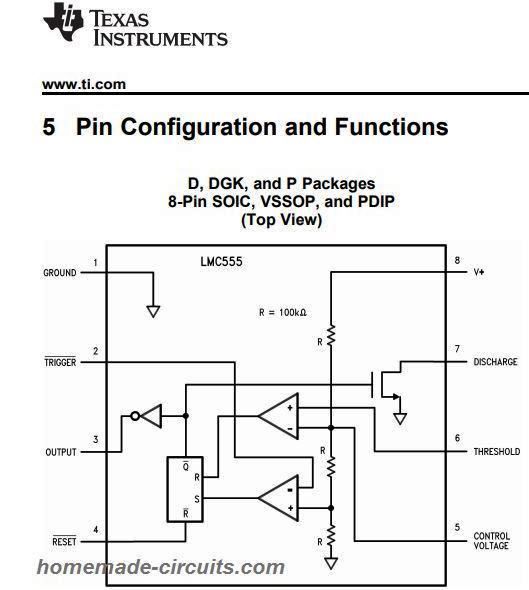
Alocarea pinouturilor IC L293
Acum, să învățăm funcțiile de identificare ale IC L293, făcând referire la următoarea diagramă și din următoarea explicație:

Pinul 2 este intrarea de control, care controlează pinul de ieșire # 3.
În mod similar, pinul # 7 este intrarea de control pentru pinul de ieșire # 6.
Pinul # 1 este utilizat pentru activarea sau dezactivarea seturilor de pinouts de mai sus. Un pozitiv la pinul 1 menține seturile de pinouts de mai sus activate și active, în timp ce o sursă negativă sau 0V le dezactivează instantaneu.
În mod identic, pinul # 15 și pinul # 10 devin intrările de control pentru ieșirile corespunzătoare pinului # 14 și pinul # 11, iar acestea rămân operaționale numai atât timp cât pinul # 9 este ținut în logica pozitivă și este dezactivat atunci când o logică 0V este aplicat pe acest pinout.
Așa cum s-a explicat anterior, pinul # 3 și pinul # 6 pot fi utilizate ca perechi de totemuri prin alimentarea unui semnal logic antifazic pe pinul de intrare # 7 și pinul 2. Adică, când pinul # 2 este alimentat cu o logică pozitivă, pinul # 7 trebuie să fie la o logică negativă și invers.
Acest lucru va permite ieșirilor pinul 6 și pinul 3 să acționeze sarcina conectată într-o direcție corespunzătoare și invers când semnalele logice de intrare sunt inversate, polaritatea sarcinii este inversată și va începe să se rotească în direcția opusă.
Dacă această secvență este comutată rapid, sarcina funcționează corespunzător într-un mod de întoarcere sau de întoarcere sau într-un mod de împingere.
Operația de mai sus poate fi reprodusă și pe cealaltă pereche de drivere.
Vcc sau intrările pozitive de alimentare pentru IC sunt configurate independent pentru două intrări de alimentare diferite.
Pinul # 16, (Vcc1) este utilizat pentru operarea pinouturilor de activare și pentru operarea altor etape logice interne ale IC-ului, iar acesta ar putea fi furnizat cu o intrare de 5V, deși limita maximă este de 36V
Pinul 8, (Vcc2) este utilizat în mod special pentru alimentarea motoarelor, iar acesta poate fi alimentat cu orice de la 4,5V la 36V
Specificații electrice ale IC L293
IC L293 este proiectat să funcționeze cu orice sursă cuprinsă între 4.5V și 36V, cu o specificație maximă de manipulare a curentului de cel mult 1 amp (2 Amp în modul impuls, 5ms max)
Prin urmare, orice sarcină în cadrul specificațiilor menționate mai sus poate fi operată pe ieșirile discutate ale IC L293.
Logica de control a intrării nu trebuie depășită peste 7V, fie ca sursă continuă, fie ca sursă PWM.
Utilizarea L293 IC pentru aplicația de control al motorului
Acum, să învățăm cum să implementăm circuite de control al motorului folosind IC L293 prin diferite moduri de operare și folosind până la 4 motoare cu facilități de control separate.
În postarea noastră anterioară am studiat detaliile pinout și funcționarea IC L293, aici aflăm cum poate fi utilizat același IC pentru controlul motoarelor prin moduri și configurații specifice.
Moduri de control
IC L293 poate fi utilizat pentru controlul motoarelor în următoarele moduri:
1) 4 motoare prin intrări PWM independente.
2) 2 motoare într-un mod bidirecțional sau totem cu control al vitezei prin PWM
3) Un motor BLDC bifazat care utilizează intrarea PWM
Imaginea de mai jos arată modul în care IC-ul ar putea fi utilizat pentru controlul motoarelor cu comenzi independente și, de asemenea, modul în care un singur motor ar putea fi utilizat pentru realizarea unui control bidirecțional :

Partea stângă a IC arată un motor configurat să funcționeze în modul bidirecțional. Pentru a vă asigura că motorul se rotește într-una din direcțiile selectate, pinul # 1 și pinul # 7 trebuie aplicate cu o intrare antifazică de 5V DC. Pentru a schimba direcția de rotație a motorului, această polaritate de 5V ar putea fi modificată pe pinouturile de intrare menționate.
Pinul # 1 trebuie ținut la un nivel logic ridicat pentru a menține motorul și funcționarea circuitului activat, un logic 0 va opri instantaneu motorul.
Alimentarea la pinouturile de intrare a controlului ar putea fi sub forma unui PWM, pentru care ar putea fi utilizat suplimentar controlând viteza motorului de la 0 la maxim pur și simplu prin variația ciclului de funcționare PWM.
Partea dreaptă a CI prezintă un aranjament în care câteva motoare sunt controlate independent prin intrări PWM independente la pinul # 15 și pinul # 10 respective.
Pinul # 9 trebuie ținut la un nivel logic ridicat pentru a menține motorul și circuitul funcțional. Un zero logic la acest pinout va opri instantaneu și va dezactiva funcția motoarelor atașate.
Deoarece secțiunile laterale stânga și dreapta ale CI sunt identice cu detaliile lor de funcționare pinout, dispunerea arătată a motoarelor ar putea fi schimbată pe pinouts relevante pentru a obține o funcționare identică așa cum s-a explicat mai sus, ceea ce înseamnă că două motoare individuale ar putea fi conectate partea stângă a CI exact așa cum a fost implementat în partea dreaptă a CI în diagramă.
În mod similar, sistemul bidirecțional ar putea fi încorporat în partea dreaptă a pinouturilor IC exact așa cum s-a obținut în partea stângă a IC-ului în diagrama de mai sus.
Exemplul de mai sus arată cum IC L293 poate fi utilizat pentru controlul individual al a 4 motoare sau 2 motoare într-un mod bidirecțional și modul în care viteza poate fi controlată, de asemenea, utilizând o alimentare PWM la pin-urile de intrare relevante ale IC-ului.
Folosind L293 pentru a controla un motor BLDC cu 2 faze

În imaginea de mai sus putem vedea cum IC L293 poate fi configurat pentru a controla un motor BLDC cu 2 faze utilizând pinouturile indicate și prin câteva intrări de control prezentate ca control A și control B.
Un singur motor cu 2 faze poate fi văzut conectat la ieșirile IC-ului, în timp ce intrările sunt cablate cu un set de porți NU care devin responsabile pentru crearea logicii de intrare antifazice necesare pentru controlul motorului.
Punctele de control A și Control B pot fi supuse unei logici alternative pentru a permite motorului bifazic să se rotească corect.
Polaritatea logicii alternante decide direcția de rotație a motorului.
Pentru realizarea unui control liniar al vitezei pe motor, o formă logică PWM ar putea fi implementată pe intrările de control A și control B și ciclul său de funcționare ar putea fi variat pentru a realiza controlul dorit al vitezei pe motorul conectat.
Dacă aveți îndoieli suplimentare cu privire la specificațiile tehnice sau la foaia tehnică sau detaliile de identificare ale IC-ului, puteți fi mereu liber să comentați mai jos pentru răspunsuri instantanee.
Precedent: Termometru fără fir cu 433 MHz RF Link folosind Arduino Următorul: Circuit ESC universal pentru motoare BLDC și alternator