Postul explică un circuit simplu al driverului motorului cu comandă laser cu linie, care funcționează răspunzând la o linie laser orizontală de precizie, generată de la un dispozitiv de nivel laser cu linie și reglează automat alinierea instrumentului conectat sau lucrarea lucrării cu o perfecțiune și precizie extreme.
Ce este Line Laser
Echipamentul cu laser de linie este un înlocuitor electronic de înaltă precizie al aliniatorului de nivel dublu al tâmplarilor.
Dispozitivul laser de linie este de fapt un echipament avansat de emisie de laser care poate genera un 360 ° linie laser orizontală iluminată de înaltă precizie, pentru a oferi o referință de calibrare la toate lucrările de inginerie industrială sau de construcție, astfel încât rezultatul final al lucrării să fie perfect drept și aliniat fără nici o mică eroare.
Circuitul a fost solicitat de unul dintre cititorii dedicați ai acestui blog, domnul Rafal.
Discuțiile detaliate privind procedura de lucru a motorului cu comandă laser cu linie pot fi învățate din următoarele paragrafe:
Obiectiv de proiectare
Domnul. Rafal: Sunt foarte nou în acest sens. Am făcut unele cercetări în ultimele săptămâni și nu am găsit exact ceea ce am nevoie.
Voi fi recunoscător pentru orice ajutor. Atasez o fotografie a ideii mele. Vreau să controlez două motoare de 12 V DC cu nivel laser.
Nivelul laserului de linie va semnaliza receptorii.

Acest semnal va trebui apoi să controleze direcția motorului de 12 V DC. Motorul rotește tija filetată înainte și înapoi pentru a regla înălțimea sculei.
Din ceea ce am descoperit, ar exista mai multe fotodioduri conectate în paralel, unul setat pentru a detecta laserul peste nivelul zero și celălalt sub acel nivel. Nivelul nul este doar un fel de pauză între fotodiodele pentru a împiedica sistemul să se trezească. Senzor laser fără afișaj. Am dat doar o fotografie picturală.
Am nevoie de un circuit H bridge, dar toate cele găsite de mine urmează să fie utilizate cu un sistem Arduino. Dacă este necesar, pot achiziționa un pod gata făcut la un preț rezonabil de până la 30 USD
În mod ideal, acest lucru ar funcționa atât cu laserele roșii, cât și cu cele verzi, dar lungimile de undă sunt atât de diferite încât mă îndoiesc că s-ar putea face și nu ar funcționa pe întregul spectru de lumină.
Inițial, aș dori să setez nivelul acestui fascicul atașat motoarelor cu butoanele sus-jos. Aș fi încântat dacă cel de-al doilea motor s-ar nivela apoi cu giroscopul în timp ce îl configurează, dar fără Arduino ar putea fi foarte dificil.
Simt că ceea ce încerc să fac este atât de simplu încât pot scăpa fără să folosesc Arduino. Și insist asupra unui analog, din cauza condițiilor dificile de pe un șantier și mi se pare că, cu cât este mai electronică, cu atât este mai puțin de încredere dispozitivul.
Acesta va funcționa numai în interior, iar distanța laserului este de maxim 10m. Motorul pe care l-am găsit la început are un consum mare de curent de 200mA maxim 2,19 A, dar și un cuplu mare.
Alimentare 18 V DC de la o baterie Makita.
Vă mulțumim anticipat pentru sugestii.
Salutari din Polonia
Rafal
Stil : Am o confuzie cu privire la funcționarea arborilor motorului. Șurubul filetat de pe ambele motoare va împinge instrumentul, dar nu îl poate trage înapoi? Cum funcționează asta?
Este posibil să se implementeze același lucru cu un singur motor?
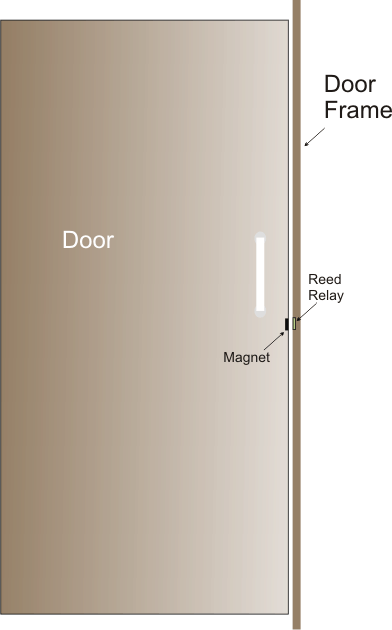
Domnul. Rafal: Drepturile de nivelare inferioare ar fi poate de 70 cm, numai pentru încăperile mici, de ex. o toaletă pentru a putea intra printr-o ușă.
Mașină fără acționare, trasă manual, numai drepte de nivelare. În videoclip, cele două obiecte galbene de pe catarge sunt detectoare laser atașate rigid de drepte.
Laserul stă undeva mai departe și produce o linie orizontală.
Motoarele ar fi atașate la un cărucior și șurubul filetat la nivelurile de nivelare cu detectoare laser. Trebuie să existe două motoare pentru nivelarea ambelor părți, dar este o imagine în oglindă.
Singura parte comună ar fi un H-bridge cu două canale, de parcă aș face-o dintr-un modul gata făcut și, eventual, dintr-un giroscop, dar asta este un vis :).
Este important să existe butoane pentru rotațiile motoarelor stânga și dreapta.
Procedura este aceasta. Atârn laserul, de exemplu, la 2 m deasupra nivelului de podea desemnat. Măsoară 2 metri de la raza laser până la marginea inferioară a muchiilor.
Reglez înălțimea apăsând butoanele comutatoarele dreapta-stânga, astfel încât să fie egală cu 2 metri până la marginea de jos a marginilor. Am pus detectoarele pe catarg, astfel încât fasciculul laser să fie la nivel zero între secțiunile fotodiodelor. Iar restul se va face singur
În atașament am pus un desen al funcționării detectorului.
Rafal
Proiectarea circuitului

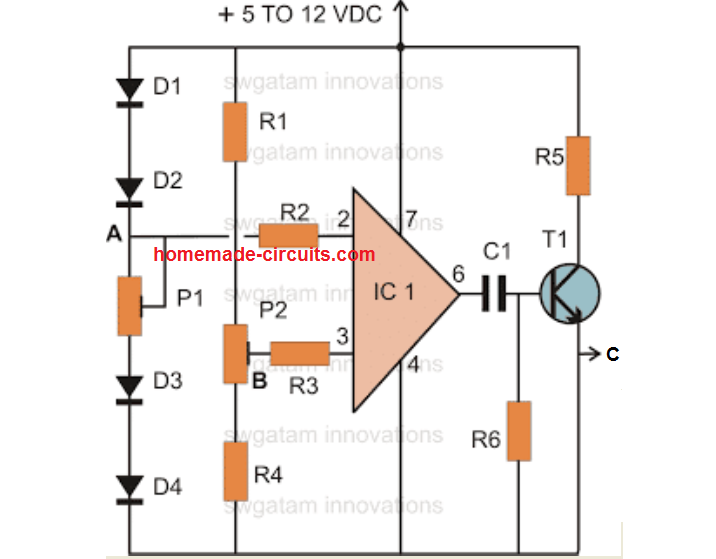
Privind figura de mai sus, vor fi necesare două astfel de etape de circuite identice pentru detectarea și corectarea instrumentului asociat controlat de motor în ceea ce privește precizia liniei laserului.
Cele două etape identice sunt imagini în oglindă una cu alta, după cum se arată mai jos:

Circuitul este destul de simplu. Funcționează cu un comparator de ferestre care asigură că motoarele de acționare sunt nefuncționale atâta timp cât perechea de LDR este expusă cu luminozitatea liniei laserului identice.
O jumătate de tensiune de alimentare este apoi generată la intrarea non-inversantă a A1 și la intrarea inversantă a A2.
De îndată ce este detectată o deviere în linia laser (ceea ce se poate întâmpla dacă instrumentul controlat de motor nu este aliniat drept), luminozitatea care afectează LDR-urile R1 și R2 se schimbă.
În această situație, tensiunea de intrare la comparatorul de ferestre se îndepărtează de jumătate din tensiunea de alimentare. Această situație determină ieșirea comparatorului să comande rețeaua podului motorului pentru a deplasa motorul în sensul acelor de ceasornic sau în sens invers acelor de ceasornic.
Tranzistori T1. . . T4 sunt configurate ca o rețea de punte pentru a permite comutarea motorului direcții înainte și inversă în funcție de iluminarea LDR sau de unghiul de deviere a liniei laser.
Diodele D1. . . D4 sunt poziționate pentru a anula vârfurile de tensiune generate în timpul în care motorul este activ și funcționează. Funcția potențiometrelor presetate P1 și P2 este de a facilita reglajele de aliniere.
Acestea sunt reglate fin pentru a se asigura că motorul este complet oprit și inactiv atâta timp cât perechea LDR relevantă este expusă la aceeași luminozitate a luminii laser.
Să presupunem, de exemplu, că din cauza alinierii incorecte a instrumentului controlat de motor, înclinarea laserului determină reducerea luminii pe LDR R2 decât LDR R1. Acest lucru va duce la tensiunea din punctul A să crească peste jumătate din tensiunea de alimentare.
În această situație, ieșirea amplificatorului opțional A1 devine ridicată, forțând tranzistorii T1 și T4 să funcționeze. La rândul său, acest lucru determină rotirea motorului în direcția relevantă. Această acțiune deplasează automat instrumentul conectat într-o linie dreaptă până când precizia de aliniere orizontală coincide cu precizia liniei laser.
În schimb, dacă presupunem că instrumentul trebuie înclinat cu orientarea opusă, astfel încât iluminarea LDR-urilor să fie opusă celei descrise mai sus, face ca tensiunea din punctul A să scadă sub jumătate din tensiunea de alimentare. Această condiție declanșează amplificatorul opțional A2 de ieșire, astfel încât T3 și T2 să devină operaționale.
Acest lucru duce la motorul care funcționează acum în direcția opusă, într-o încercare de a corecta alinierea sculei în direcția relevantă până când devine perfect dreaptă, coincizând cu precizia orizontală a liniei laserului.
Buton Sus / Jos
Butoanele sus în jos pentru setarea inițială a înălțimii nivelului de spirit pot fi pur și simplu implementate prin cablarea comutatoarelor cu buton în paralel cu fiecare dintre LDR-uri.
Instalare LDR
Pentru a obține răspunsul corect de la LDR-uri, perechile din stânga dreapta trebuie să fie instalate într-un tub ca o carcasă, astfel încât să poată „vedea” doar iluminarea laserului și nu orice altă lumină ambientală.
Ideea poate fi asistată în următoarea imagine:

Aici, putem vedea că LDR-urile sunt poziționate foarte aproape una de cealaltă, ceea ce asigură faptul că atunci când linia laser este la centrul exact, o parte din ambele perechi LDR sunt iluminate uniform de lumina laser.
Partea frontală a incintei LDR ar putea fi acoperită cu un obiectiv difuz, astfel încât iluminarea laserului să poată fi difuzată în interior peste LDR-urile respective în mod uniform.
Precedent: Circuit simplu de alarmă antifurt pentru a proteja obiectele valoroase Următorul: Circuit de testare universal BJT, JFET, MOSFET