Postul detaliază diferitele metode de configurare a unui circuit de corectare a factorului de putere sau a unui circuit PFC în proiectele SMPS și explică cele mai bune opțiuni de practică pentru aceste topologii, astfel încât să respecte normele moderne de restricție PFC.
Proiectarea unor circuite eficiente de alimentare nu a fost niciodată ușoară, cu toate acestea, în timp, cercetătorii au reușit să rezolve majoritatea problemelor în cauză și, în aceleași linii, proiectele moderne SMPS sunt, de asemenea, optimizate cu cele mai bune rezultate posibile, datorită standardele de reglementare emergente care au jucat un rol important în implementarea parametrilor de calitate mai stricți pentru unitățile moderne de alimentare cu energie electrică.
Liniile directoare PFC
Restricțiile moderne privind calitatea alimentării cu energie electrică sunt stabilite destul de agresiv, colectiv prin eforturile producătorilor, furnizorilor și altor organe de conducere interesate.
Printre numeroșii parametri de calitate stabiliți pentru proiectele moderne de alimentare cu energie, corecția de corecție a factorului de putere (PFC), care este de fapt sub formă de anulare armonică, a fost declarată ca o cerință obligatorie prin regulile IEC 61000-3-2.
Datorită acestui fapt, proiectanții sunt nevoiți să se confrunte cu provocări mai dure în proiectarea etapelor de corecție a factorului de putere în proiectele lor de alimentare, pentru a îndeplini aceste legi moderne stricte, iar sursele de alimentare devin din ce în ce mai formidabile cu specificațiile și gama de aplicații, structurând circuite PFC adecvate. nu devine mai ușor pentru mulți producători din arenă.
Tutorialele prezentate sunt special dedicate pentru toate acele asociații și profesioniști care sunt în producție sau proiectarea flyback SMPS pentru a le facilita cele mai ideale modele și calcule PFC conform cerințelor lor individuale.
Discuțiile incluse în aceste tutoriale vă vor ajuta să proiectați circuite PFC chiar și pentru unități semnificativ mari în intervalul de până la 400 de wați, 0,75 amperi.
Cititorii vor avea, de asemenea, posibilitatea de a afla despre selectarea convertoarelor izolate într-o singură etapă, care includ și drivere cu LED-uri. Tutorialul și instrucțiunile de proiectare pas cu pas, împreună cu comparațiile la nivel de sistem, numeroșii designeri implicați activ în domeniul electronicii de putere vor fi informați în mergeți cu cea mai optimă abordare pentru nevoile lor specifice de aplicație
Obiectiv de corectare a factorului de putere
Optimizarea circuitului de corecție a factorului de putere în cadrul unităților moderne SMPS (alimentare cu modul de comutare) ar putea evolua în trecutul recent datorită apariției unui număr de circuite integrate avansate relevante (IC-uri), ceea ce a făcut posibilă stabilirea diferitelor modele PFC având specific moduri de operare și cu capacitate individuală de gestionare a provocărilor.
Odată cu creșterea gamei de topologii SMPS, complexitatea în proiectarea și implementarea PFC s-a agravat și în zilele noastre.
În primul tutorial vom învăța cu privire la detaliile operaționale ale proiectului, care sunt preferate de către profesioniștii corecții.
Practic, corecția factorului de putere ajută la optimizarea curentului de intrare în cadrul surselor de alimentare off-line, astfel încât acestea să poată spori puterea reală de la intrarea de rețea disponibilă.
Conform cerințelor normale, un anumit aparat electric trebuie să se emule ca o sarcină cu o rezistivitate pură, astfel încât să îi permită să aibă un consum de energie reactivă zero.
Această condiție are ca rezultat generarea de curenți armonici de intrare aproape zero, cu alte cuvinte permite curentului consumat să fie perfect în linie în fază cu tensiunea de alimentare de intrare care este în mod normal sub forma unei unde sinusoidale.
Această realizare facilitează aparatului să consume „puterea reală” de la rețea la cele mai optime și mai eficiente niveluri, ceea ce duce la minimizarea irosirii de energie electrică și la creșterea eficienței acesteia.
Această utilizare eficientă a energiei electrice nu numai că ajută aparatul să se prezinte în cel mai eficient mod, ci și pentru companiile de utilități și echipamentele de capital implicate pentru proces.
Funcția de mai sus permite, de asemenea, liniilor de alimentare să fie libere de armonici și de interferențele rezultate între dispozitivele din rețea.
În afară de avantajele menționate mai sus, includerea unui PFC în unitățile moderne de alimentare este, de asemenea, pentru respectarea cerințelor de reglementare stabilite în Europa și Japonia cu IEC61000-3-2 pe care toate echipamentele electrice ar trebui să le califice.
Condiția menționată mai sus a fost reglementată pentru majoritatea aparatelor electronice care pot fi clasificate la peste 75 de wați conform standardelor echipamentelor de clasa D sau care sunt chiar mai mari, specificând cea mai mare amplitudine a armonicelor de frecvență de linie variind până la a 39-a armonică.
În afară de aceste standarde, PFC este utilizat și pentru asigurarea altor eficiențe, cum ar fi Energy Star 5.0 vital pentru computere și Energy Star 2.0 pentru sistemele de alimentare și televizoarele din 2008.
Definiția Power Factor
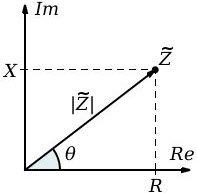
PFC sau Corecția factorului de putere poate fi definită ca raportul dintre puterea reală și puterea aparentă și exprimată ca:
PF = Puterea reală / puterea aparentă, unde puterea reală este exprimată în
Watts, în timp ce puterea aparentă este exprimată în VA.
În această expresie, puterea reală este determinată ca media produsului instantaneu de curent și tensiune pe o fază sau ciclu, în timp ce puterea aparentă este considerată ca valoarea RMS a curentului de tensiune.
Acest lucru sugerează că ori de câte ori omologii de curent și tensiune sunt sinusoidali și în fază între ei, factorul de putere rezultat este 1,0.
Cu toate acestea, într-o stare în care curentul, parametrii de tensiune sunt sinusoidali, dar nu în fază, dă naștere unui factor de putere care este cosinusul unghiului de fază.
Condițiile factorului de putere descrise mai sus se aplică în cazurile în care tensiunea și curentul sunt atât unde sinusoidale pure, coroborate cu o situație în care sarcina însoțitoare este alcătuită din componente rezistive, inductive și capacitive care pot fi toate neliniare în natură, că nu se ajustează cu parametrii de curent și tensiune de intrare.
Topologiile SMPS introduc de obicei impedanță neliniară în linia de rețea datorită naturii explicate mai sus a circuitelor sale.
Cum funcționează SMPS
Un circuit SMPS include practic o etapă de redresare la intrare care ar putea fi o redresoare cu jumătate de undă sau cu undă completă și un condensator de filtrare complementar pentru menținerea tensiunii rectificate peste acesta la nivelul de vârf al undei sinusoidale de alimentare de intrare până la momentul următorului vârf. apare unda sinusoidală și repetă ciclul de încărcare al acestui condensator, rezultând tensiunea constantă de vârf necesară pe acesta.
Acest proces de încărcare a condensatorului pe fiecare ciclu de vârf al AC necesită ca intrarea să fie echipată cu suficient curent pentru a satisface consumul de sarcină al SMPS, între aceste intervale de vârf.
Ciclul este implementat prin descărcarea rapidă a unui curent mare în condensator, care se aplică sarcinii prin descărcare până la sosirea următorului ciclu de vârf.
Pentru acest model de încărcare și descărcare inegală, se recomandă ca curentul de impuls de la condensator să fie evaluat cu 15% mai mare decât cerința medie a sarcinii.

Putem vedea în figura de mai sus că, în ciuda cantității semnificative de distorsiuni, tensiunea și parametrii de curent sunt aparent în fază unul cu celălalt.
Cu toate acestea, dacă aplicăm termenul de „cosinus de unghi de fază” la cele de mai sus, ar rezulta o inferență incorectă în ceea ce privește alimentarea cu energie având un factor de putere de 1,0
Formele de undă superioară și inferioară indică cantitatea de conținut armonic al curentului.
Aici „conținutul armonic fundamental” este indicat în comparație cu o amplitudine de 100%, în timp ce armonicele superioare sunt prezentate ca procentaje suplimentare ale amplitudinii fundamentale.
Cu toate acestea, deoarece puterea reală este determinată doar de componenta fundamentală, în timp ce celelalte armonici suplimentare reprezintă doar puterea aparentă, factorul de putere real poate fi destul de sub 1.0.
Numim această abatere prin termenul factor de distorsiune, care este fundamental responsabil pentru a da naștere unui factor de putere neunitar în unitățile SMPS.
Expresie pentru puterea reală și aparentă
O expresie generală care se referă la conexiunea dintre puterea reală și cea aparentă poate fi dată după cum urmează:

În cazul în care cosΦ formează factorul de deplasare care iese din unghiul de fază Φ între formele de undă curent / tensiune și cosΦ semnifică factorul de distorsiune.

Referindu-ne la diagrama de mai jos, putem asista la o situație care arată o corecție perfectă a factorului de putere.

Putem vedea că aici forma de undă actuală reproduce în mod ideal forma de undă de tensiune, deoarece ambele funcționează aparent în fază și sincronizate între ele.
Prin urmare, aici se poate presupune că armonicele curentului de intrare sunt aproape zero.
Corecția factorului de putere împotriva reducerii armonice
Privind ilustrațiile anterioare, este evident că factorul de putere și armonicele joase funcționează sincronizate între ele.
În general, se percepe că, dacă sunt conturate limitele pentru armonicele respective, ar putea contribui la restricționarea contaminării curentului de intrare în liniile electrice prin eliminarea perturbărilor de curent interferente cu celelalte aparate din vecinătate.
Prin urmare, în timp ce procesarea curentului de intrare poate fi denumită „corecție a factorului de putere”, magnitudinea de ieșire a rafinamentului a considerat că această procesare este înțeleasă ca un conținut armonic conform normelor internaționale.
Pentru topologiile SMPS, în mod normal, elementul de deplasare este aproximativ la unitate, dând naștere următoarelor relații între factorul de putere și distorsiunea armonică.

În expresia THD reprezintă Distorsiunea armonică totală ca suma pătratică a armonicilor dăunătoare asupra conținutului fundamental, exprimând greutatea relativă a conținutului armonic asociat cu referire la omologul fundamental. Cealaltă ecuație asociază figura absolută a THD și nu în proporția%, exprimând faptul că THD trebuie să fie în esență zero pentru a crea un PF de unitate.
Tipuri de corectare a factorului de putere
Caracteristica formei de undă de intrare din figura de mai sus demonstrează un tip tipic „activ” de corecție a factorului de putere pentru un dispozitiv SMPS introdus între o configurație de redresor de intrare și un condensator de filtrare și printr-un circuit integrat PFC care controlează procedurile împreună cu circuitele asociate pentru asigurându-se că curentul de intrare urmează coeziv forma de undă a tensiunii de intrare.
Acest tip de procesare poate fi considerat ca fiind cel mai răspândit tip de PFC utilizat în circuitele SMPS moderne, după cum se poate vedea în figura de mai jos.
Acestea fiind spuse, nu este nicidecum obligatoriu ca numai versiunile „active” care utilizează circuite integrate și semiconductori să fie utilizate pentru PFC propus, o altă formă de proiectare care poate garanta o cantitate rezonabilă de PFC sub reglementările stabilite este binevenită în mod normal.
S-a observat că, de fapt, un singur inductor care înlocuiește poziția omologului „activ” este capabil să respingă în mod satisfăcător armonicile controlând vârfurile și distribuind curentul uniform în sincronizare cu tensiunea de intrare destul de eficient.
Design pasiv PFC
Cu toate acestea, această formă de control PFC pasiv ar putea solicita un inductor cu miez de fier semnificativ voluminos și, prin urmare, poate fi utilizată pentru aplicații în care compactitatea nu este o cerință crucială. (pagina 12)
Un singur inductor pasiv ar putea părea o soluție rapidă pentru PFC, dar pentru o aplicație cu putere mare, dimensiunea ar putea începe să devină neinteresantă din cauza dimensiunilor sale impracticabil mari.
În graficul de mai jos suntem capabili să asistăm la caracteristicile de intrare a trei numere de variante SMPS de 250 wați pentru PC, fiecare reprezentând o formă de undă de curent la un factor de scară echivalent.
Putem vedea cu ușurință că rezultatul obținut de la un inductor pasiv bazat pe PFC este cu 33% mai mare vârfuri de curent, decât cu omologul filtrului PFC activ.
Chiar dacă acest lucru poate fi în măsură să treacă peste standardele IEC61000-3-2, cu siguranță nu va fi la egalitate cu ultima regulă mai strictă a cerințelor 0.9PF și ar eșua la nivelul de acceptare QC, stabilit conform acestor noi standarde.
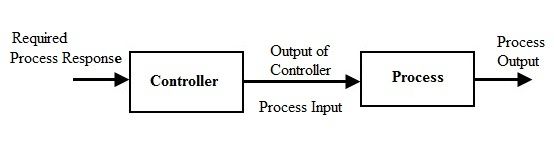
Diagrama bloc de bază

Datorită tendinței în curs de desfășurare a pieței electronice, în care putem vedea costurile cuprului în creștere, împreună cu creșterea procesului de nuclee magnetice și introducerea materialelor semiconductoare moderne, mult mai ieftine, nu va fi o surpriză dacă observăm abordarea PFC activă devenind extrem de popular decât omologul pasiv.
Și această tendință ar putea fi percepută a crește și mai puternic în viitorul viitor, prezentând soluții PFC din ce în ce mai avansate și îmbunătățite pentru mulți designeri și producători SMPS.

Compararea armoniei liniei de intrare cu standardele IEC610003-2
În figura de mai jos putem vedea urmele a trei rezultate separate SMPS PC de 250 wați cu referire la restricțiile IEC6000-3-2. Restricția indicată este valabilă pentru toate gadgeturile din clasa D, cum ar fi computerele, televizoarele și monitoarele acestora.
Limita afișată a conținutului armonic este stabilită în funcție de puterea de intrare a dispozitivelor. Pentru produsele legate de lumini, cum ar fi luminile cu LED-uri, luminile CFL, se respectă în mod normal restricțiile de clasă C, care sunt identice cu cele ale puterii lor de intrare.
Alte produse electronice neconvenționale își găsesc limita PFC stabilită proporțional cu o putere de intrare de minimum 600 wați.
Dacă ne uităm la urmărirea PFC pasivă, constatăm că este cu greu în conformitate cu limita de restricție stabilită, doar o situație de tip touch and go (la nr. Armonică 3)

Analiza caracteristicilor PFC pasive
În figura următoare putem vedea un exemplu clasic de circuit PFC pasiv conceput pentru o sursă de alimentare tradițională pentru computer. Lucrul notabil aici este conectarea robinetului central al inductorului PFC cu tensiunea de intrare a liniei de intrare.
În modul de selecție 220V (comutatorul deschis), toate cele două secțiuni ale inductorului sunt aplicate cu rețeaua redresoare care funcționează ca un circuit redresor cu punte completă.
Cu toate acestea, în modul 110V (închiderea comutatorului), doar 50% sau o jumătate din bobină este utilizată prin secțiunea din stânga a bobinei fiind implementată, în timp ce secțiunea redresorului este acum transformată într-un circuit de dublare a redresorului cu jumătate de undă.
Deoarece selecția de 220V va genera aproximativ 330V după rectificarea completă a undei, aceasta formează intrarea magistralei pentru SMPS și are posibilitatea de a fluctua semnificativ în conformitate cu tensiunea liniei de intrare.
Exemplu de diagramă de circuit

Deși acest design PFC pasiv ar putea arăta destul de simplu și impresionant cu performanțele sale, acesta ar putea prezenta câteva dezavantaje notabile.
Împreună cu natura voluminoasă a PFC, alte două lucruri care îi afectează performanța sunt mai întâi, includerea unui comutator mecanic care face sistemul vulnerabil la o posibilă eroare umană în timpul funcționării unității și, de asemenea, problemele de uzură asociate.
În al doilea rând, tensiunea de linie care nu este stabilizată are ca rezultat ineficiențe relative în ceea ce privește eficiența costurilor și precizia de conversie a puterii de la DC la DC, legată de ieșirea PFC.
Controlere ale modului de conducere critică (CrM)
Etapa controlerului numită modul de conducție critică, care este, de asemenea, denumită modul de tranziție sau controlerul de mod de conducere la limită (BCM) sunt configurații de circuite care pot fi găsite eficient utilizate în aplicațiile electronice de iluminat. Deși sunt ușor de utilizat, aceste controlere sunt relativ scumpe.
Următoarea diagramă 1-8 demonstrează un design regulat al circuitului controlerului CrM.

De obicei, un controler CrM PFC va avea tipul de circuit prezentat mai sus, care poate fi înțeles cu ajutorul următoarelor puncte:
O intrare a unei etape multiplicatoare de referință primește un semnal dimensionat corespunzător de la o ieșire amplificator de eroare asociată având un pol de frecvență joasă.
Cealaltă intrare a multiplicatorului poate fi văzută ca referință cu o tensiune stabilizată de curent continuu extrasă dintr-o intrare de linie de curent alternativ.
Astfel, ieșirea rezultată din multiplicator este produsul de curent continuu relativ de la ieșirea amplificatorului de eroare și semnalul la care se face referire sub formă de impulsuri sinusoidale CA de undă completă de la intrarea de curent alternativ.
Această ieșire din etapa multiplicatoare poate fi văzută și sub formă de impulsuri de undă sinusoidală cu undă completă, dar redusă corespunzător proporțional cu semnalul de eroare aplicat (factorul de câștig) utilizat ca referință pentru tensiunea de intrare.
Amplitudinea semnalului acestei surse este ajustată în mod corespunzător pentru a implementa puterea medie specificată corectă și pentru a asigura o tensiune de ieșire reglată corespunzător.
Etapa care este responsabilă pentru procesarea amplitudinii curentului face ca curentul să curgă în conformitate cu forma de undă de ieșire din multiplicator, cu toate acestea amplitudinea semnalului curentului de frecvență de linie (după netezire) poate fi de așteptat să fie jumătate din această referință din etapa multiplicatorului .
Aici, operațiile prin circuitele de modelare a curentului pot fi înțelese după cum urmează:

Referindu-ne la diagrama de mai sus, Vref reprezintă semnalul ieșit din stadiul multiplicator, care este alimentat în continuare către unul dintre opampurile unui comparator a cărui a doua intrare este menționată cu semnalul curent al formei de undă.
La comutatorul de alimentare, curentul de pe inductor crește încet până când semnalul de pe șunt ajunge la nivelul Vref.
Acest lucru forțează comparatorul să-și schimbe ieșirea de la Pornit la OPRIT oprind alimentarea circuitului.
De îndată ce se întâmplă acest lucru, tensiunea care creștea treptat peste inductor începe să scadă încet spre zero și odată ce atinge zero, ieșirea opamp se revine și pornește din nou, iar ciclul continuă să se repete.
După cum indică denumirea caracteristicii de mai sus, modelul de control al sistemului nu permite niciodată curentului inductor să treacă peste limita prestabilită între modurile de comutare continuă și discontinuă.
Acest aranjament ajută la prezicerea și calcularea relației dintre nivelul curent de vârf mediu al rezultatului rezultat din opamp. Deoarece răspunsul este sub formă de unde triunghiulare, media formei de undă semnifică exact 50% din vârfurile reale ale formelor de undă triunghiulare.
Acest lucru implică faptul că valoarea medie rezultată a semnalului curent al undelor triunghiului ar fi = Curent inductor x R sens sau pur și simplu pune jumătate din nivelul de referință presetat (Vref) al opamp.
Frecvența regulatoarelor care utilizează principiul de mai sus va depinde de tensiunea liniei și de curentul de sarcină. Frecvența ar putea fi mult mai mare la tensiuni de linie mai mari și ar putea varia pe măsură ce intrarea de linie variază.
Mod de conducție critică cu frecvență blocată (FCCrM)
În ciuda popularității sale în diverse aplicații de control PFC pentru surse de alimentare industriale, controlerul CrM explicat mai sus implică unele dezavantaje inerente.
Principalul defect al acestui tip de control PFC activ este instabilitatea frecvenței sale în ceea ce privește condițiile de linie și de încărcare, care arată o creștere a frecvenței cu sarcini mai ușoare și tensiuni de linie mai mari și, de asemenea, în timp ce de fiecare dată când undele sinusoidale de intrare se apropie de punctele de trecere zero.
Dacă se încearcă remedierea acestei probleme prin adăugarea unei cleme de frecvență, rezultă o ieșire cu o formă de undă de curent distorsionată, ceea ce pare inevitabil din cauza faptului că „Ton” rămâne neajustat pentru această procedură.

Cu toate acestea, dezvoltarea unei tehnici alternative ajută la realizarea unei adevărate corecții a factorului de putere chiar și în modul discontinuu (DCM). Principiul de funcționare poate fi studiat în figura de mai jos și cu ecuațiile atașate.

Referindu-ne la diagrama de mai sus, curentul de vârf al bobinei poate fi evaluat prin rezolvarea:

Curentul mediu al bobinei cu referire la ciclul de comutare (care este, de asemenea, asumat ca curentul de linie instantaneu pentru ciclul de comutare dat, datorită faptului că frecvența de comutare este de obicei mai mare decât frecvența de linie pe care au loc variațiile tensiunii de linie ), se exprimă cu formula:

Combinarea relației de mai sus și simplificarea termenilor oferă următoarele:

Expresia de mai sus indică în mod clar și implică faptul că în cazul în care este implementată o metodă în care un algoritm are grijă să mențină ton.tcycle / Tsw la un nivel constant, ne-ar permite să obținem un curent de linie sinusoidală având un factor de putere de unitate chiar și în discontinuu mod de operare.
Deși considerațiile de mai sus dezvăluie unele beneficii distincte pentru tehnica controlerului DCM propusă, nu pare să fie alegerea ideală din cauza nivelurilor de curent de vârf asociate, așa cum se arată în tabelul următor:

Pentru a obține condiții PFC ideale, o abordare sensibilă ar fi implementarea unei condiții în care modurile de operare DCM și Crm sunt combinate pentru a mulge cel mai bine dintre acești doi omologi.
Prin urmare, atunci când condițiile de încărcare nu sunt grele și CrM rulează la o frecvență ridicată, circuitul merge pentru un mod de funcționare DCM și, în cazul în care curentul de încărcare este mare, condiția Crm este permisă să persiste, astfel încât vârfurile de curent să nu tind să depășească limitele înalte nedorite.
Acest tip de optimizare între cele două moduri de control sugerate poate fi vizualizat cel mai bine în figura următoare, în care beneficiile celor două moduri de control sunt combinate pentru realizarea celor mai dorite soluții.

Continuă modul de conducere
Modul de conducție continuă a PFC ar putea deveni destul de popular în design-urile SMPS datorită caracteristicii și gamei lor flexibile de aplicare și a mai multor avantaje asociate.
În acest mod, tensiunea de vârf curentă este menținută la un nivel mai scăzut, rezultând pierderi de comutare minimizate în cadrul componentelor relevante și, în plus, ondulația de intrare este redată la un nivel minim cu o frecvență relativ constantă, ceea ce la rândul său permite procesul de netezire mult mai simplu pentru aceeași.
Următoarele atribute asociate cu tipul CCM de PFC trebuie discutate puțin mai elaborat.
Control Vrms2
Unul dintre atributele vitale cu majoritatea designului PFC aplicat universal este semnalul de referință care trebuie să fie o imitație în jos a tensiunii de intrare rectificate.
Acest echivalent rectificat minimizat al tensiunii de intrare este aplicat în cele din urmă în circuit pentru modelarea formei de undă corecte pentru curentul de ieșire.
Așa cum s-a discutat mai sus, un stadiu de circuit multiplicator este utilizat în mod normal pentru această operațiune, dar, deoarece știm că un stadiu de circuit multiplicator ar putea fi relativ mai puțin rentabil decât un sistem tradițional de multiplicare cu intrare twn.
Un exemplu clasic de aspect este prezentat în figura de mai jos, care demonstrează o abordare PFC în mod continuu.
După cum se poate observa, aici convertorul de impuls este declanșat cu ajutorul unui PWM în modul curent mediu, care devine responsabil pentru dimensionarea curentului inductor (curent de intrare pentru convertor), cu referire la semnalul de curent de comandă, V (i) , care poate fi văzut ca echivalentul redus al tensiunii de intrare V (in) la o proporție de VDIV.
Aceasta este implementată prin împărțirea semnalului de tensiune de eroare cu pătratul semnalului de tensiune de intrare (netezit de condensatorul Cf, pentru a crea un factor de scalare simplificat cu referire la nivelul tensiunii de intrare).

Deși s-ar putea să vă fie puțin ciudat să vedeți semnalul de eroare împărțit la pătratul tensiunii de intrare, motivul din spatele acestei măsuri este de a crea un câștig de buclă (sau un răspuns dependent de tranzitoriu) care poate să nu se bazeze pe tensiunea de intrare declanșator.
Cadrarea tensiunii la numitor se neutralizează cu valoarea lui Vsin împreună cu funcția de transfer a comenzii PWM (proporționalitatea pantei curente a graficului inducrului cu tensiunea de intrare).
Cu toate acestea, un dezavantaj al acestei forme de PFC este flexibilitatea multiplicatorului, care obligă această etapă să fie un pic supra-proiectată, în special secțiunile de gestionare a puterii circuitului, astfel încât să susțină chiar și cele mai nefavorabile scenarii de disipare a puterii.
Control mediu al modului curent
În figura de mai sus putem vedea cum semnalul de referință produs din multiplicatorul V (i) semnifică forma formei de undă și gama de scalare a curentului de intrare PFC.
Etapa PWM indicată devine responsabilă de asigurarea unui curent mediu de intrare care să fie egal cu valoarea de referință. Procedura este executată printr-o etapă medie a controlerului de mod curent, așa cum se poate vedea în figura dată mai jos.

Controlul modului curentului mediu este configurat practic pentru a regla curentul mediu (intrare / ieșire) cu referire la semnalul de control Icp, care la rândul său este creat prin utilizarea unei bucle de frecvență joasă DC printr-o etapă a circuitului amplificatorului de eroare, iar acest lucru nu este altceva decât curentul echivalent corespunzător semnalului Vi care este prezentat în figura anterioară.
Amplificatorul de curent de scenă funcționează ca un integrator de curent, precum și ca un amplificator de eroare, pentru a regla forma formei de undă, în timp ce semnalul Icp generat pe Rcp devine responsabil pentru executarea controlului tensiunii de intrare DC.
Pentru a asigura un răspuns liniar de la amplificatorul de curent, intrarea sa trebuie să fie similară, ceea ce înseamnă că diferența de potențial generată în R (șunt) trebuie să fie similară cu tensiunea generată în jurul Rcp, deoarece nu putem avea un DC prin intrarea rezistenței noninversoare a amplificatorului de curent.
Ieșirea generată de amplificatorul de curent ar trebui să fie un semnal de eroare de „frecvență joasă”, în funcție de curentul mediu al șuntului, precum și de semnalul de la Isp.
Acum, un oscilator generează un semnal din dinte de ferăstrău, care este utilizat pentru a compara semnalul de mai sus cu acesta, la fel cum se face cu designul de control al modului de tensiune.
Acest lucru are ca rezultat crearea PWM-urilor determinate prin compararea celor două semnale menționate mai sus.
Soluții avansate PFC
Diferitele metode de control PFC, așa cum s-a discutat mai sus (CrM, CCM, DCM) și variantele acestora oferă proiectanților opțiuni variate de configurare a circuitelor PFC.
Cu toate acestea, în ciuda acestor opțiuni, căutarea consecventă pentru realizarea unor module mai bune și mai avansate din punct de vedere al eficienței a făcut posibilă diagnosticarea unor modele mai sofisticate pentru aceste aplicații.
Vom discuta mai multe despre acest lucru, deoarece acest articol este actualizat cu cele mai recente despre acest subiect.
Precedent: Cum se selectează încărcătorul potrivit pentru bateria Li-Ion Următorul: Circuitul Solar E Rickshaw