Postul explică modul de realizare a unui cărucior ieftin, dar puternic, controlat de la distanță, care poate fi manevrat la stânga, la dreapta, înainte și înapoi, după cum este necesar, de către utilizator, folosind receptorul de la distanță. Ideea nu se bazează pe un circuit de microcontroler.
Într-una din postările mele anterioare am discutat despre un circuit de mașină de jucărie simplu controlat de la distanță , ideea actuală a unui cărucior controlat de la distanță este inspirată de același concept, dar este destinată a fi utilizată pentru transportul de sarcini formidabile și mult mai grele.
Cărucior cu telecomandă pentru puncte de vânzare cu amănuntul
Acest design poate fi adecvat și aplicabil în mod special pentru centrele comerciale sau magazinele de vânzare cu amănuntul, unde poate fi implementat ca un vehicul de transport mic pentru transportul materialului în interiorul complexului sau în premisă cu ajutorul câtorva prese ale unității Tx de la distanță.
Primul pas în construirea căruciorului cu telecomandă propus ar fi achiziționarea unui set de module standard Rx / Tx RF fie de la dealerul local local, fie de la orice magazin online, vă recomand să cumpărați de la un magazin online, deoarece ar fi mult mai ușor și convenabil , deși mai costisitoare.
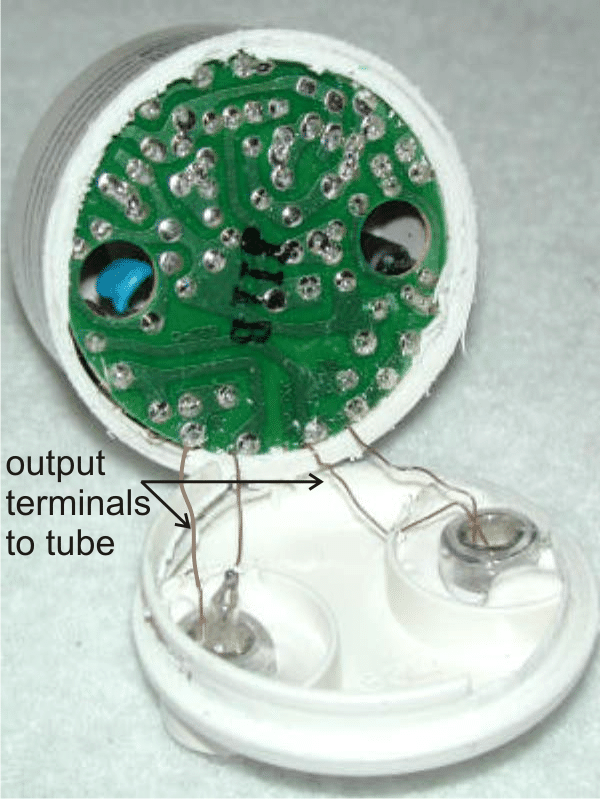
Unitățile procurate ar arăta așa cum se arată mai jos:
Folosind modulele Tx, Rx de 433 MHz

Unitatea de culoare maro din partea stângă este Tx sau unitatea emițător, în timp ce circuitul adiacent larg este Rx sau unitatea receptor.
Unitatea Tx poate fi văzută cu 4 butoane de culoare roșie marcate ca A, B, C, D, iar placa Rx poate fi văzută cu 4 relee (cutii de culoare neagră).
Cele patru butoane respective ale modulului Tx sunt cuplate fără fir pentru acționarea celor patru relee corespunzătoare ale modulului Rx.
Puteți vedea conectori fixați în jurul marginilor plăcii (de culoare verde), acești conectori sunt terminați corespunzător cu intrările de alimentare (+) (-) pentru placa Rx și, de asemenea, cu contactele releului, pentru toate cele 4 relee.
Un releu, după cum știm cu toții, constă din 5 contacte de bază și pinouturile acestora și anume: 2 pini pentru bobină, unul pentru stâlp și unul pentru N / C și N / O.
Deoarece există 4 relee în unitatea Rx, veți putea găsi 5 x 4 = 20 de ieșiri asociate cu punctele de conectare relevante.
Ar putea fi o sarcină obositoare să urmăriți separat aceste terminări ale releului de pe conectori, așa că vă recomand să lipiți firele direct pe pinouturile releului pentru a vă salva de sarcina de mai sus, acest efort va fi necesar mai târziu în timp ce angajăm unitatea cu circuitul de control al căruciorului.
Construirea circuitului de control al releului pentru cărucior
Pentru aceasta veți avea nevoie de o mână de relee și diode. Releele trebuie să fie clasificate corect pentru a putea manevra motoarele cu roți de mare putere ale căruciorului. Vă recomandăm să folosiți relee OEN make pentru acest lucru, așa cum se arată în următoarea imagine:

Diodele care vor fi necesare în circuitul driverului releului pot fi diodele noastre standard 1N4007.
Detaliile circuitului pentru acestea pot fi observate în următoarea diagramă:
Detalii cablare releu și schemă


Cum funcționează circuitul căruciorului la distanță
Folosind releele specificate mai sus și diodele, va trebui să terminați construirea plăcii de circuite a driverului de releu de mai sus, care se poate face pur și simplu pe o bucată de veroboard.
După aceasta, avem la dispoziție o sarcină majoră: integrarea firelor verzi prezentate în diagrama de mai sus cu placa Rx a telecomenzii.
Înainte de integrare va trebui să inserăm câteva moduri în modulul Rx, așa cum se explică mai jos:
Folosind bucăți de fire izolate, dezbrăcate în mod corespunzător și tăiate la capete, continuați să conectați (prin lipire) toți știfturile stâlpului releului și conectați această articulație comună cu linia pozitivă a plăcii Rx.
Acum, în această situație, putem presupune că atunci când releele nu sunt într-o stare activată (prin receptorul de la distanță), intrarea pozitivă a polului fiecărui releu va fi legată de punctele N / C respective și, atunci când este activată, pozitivul de la pol va fi schimbă și conectează-te cu punctele N / O relevante.
Pe scurt, la activare, contactul N / O va primi alimentarea pozitivă și, prin urmare, suntem interesați de această alimentare pozitivă de la contactele N / O, deoarece acestea vor fi inițiate numai atunci când sunt activate releele, ceea ce implică faptul că atunci când Tx (transmițătorul ) butoanele sunt apăsate.
Prin urmare, toate pin-urile N / O relevante trebuie unite la firele verzi ale circuitului driverului releului de mai sus.
Odată ce acest lucru este făcut, Rx va fi integrat cu modulul driverului de releu pentru executarea tuturor manevrelor prevăzute ale căruciorului controlat de la distanță, adică: mișcările înainte, inversă, mișcările și stânga, dreapta.
Alimentarea plăcii șoferului releului
Deoarece releele din etapa conducătorului de releu ar fi responsabile pentru deplasarea motoarelor grele conectate cu roata căruciorului, alimentarea pentru aceasta ar trebui să fie echivalentă, de aceea bateriile cu plumb acid cu ciclu profund devin ideal pentru această aplicație.
Presupunând că motoarele vor fi evaluate la 12V, o baterie cu plumb acid de 40 Ah ar fi suficient de bună pentru a permite căruciorului să se deplaseze chiar și cu sarcini mai mari.
Configurarea roților cu motoarele pentru manevrele prevăzute
Așa cum se poate identifica în figura următoare, căruciorul controlat de la distanță va avea nevoie de 4 roți pentru transportarea și rularea sistemului.
Cu toate acestea, numai cele două roți din față ar fi responsabile pentru activarea manevrelor de mers înapoi, înainte, dreapta și stânga și, prin urmare, motoarele ar trebui să fie fixate cu aceste două roți din față ale căruciorului, așa cum se arată în imaginea următoare:

Configurarea conexiunilor roții căruciorului
Roțile din spate sunt doar roți fictive, fixate doar pentru a permite o rulare liberă a căruciorului, ca răspuns la comenzile roții din față.
După cum se poate observa în imaginea de mai sus, modulul marcat ca ansamblu PCB este placa driverului releu, modulul de la distanță semnifică placa receptorului de la distanță Rx, în timp ce bateria este bateria de 40 AH 12V pe care am discutat-o în secțiunea anterioară a articolului.
După asamblare, poate fi necesar să modificați și să verificați conexiunile firului motorului cu placa șoferului releului.
Pentru o mișcare înainte și inversă, ambele motoare trebuie să fie sincronizate între ele, pe de altă parte, pentru a executa un flip dreapta sau stânga, motoarele trebuie să treacă printr-o mișcare de rotație opusă.
Dacă găsiți că motorul nu se comportă în modul de mai sus, cel mai probabil poate fi corectat prin simpla schimbare a polarității unuia dintre motoare. Acest lucru va corecta imediat situația și va forța motoarele să implementeze manevrele specificate.
În cele din urmă butoanele A. B, C, D pot fi potrivite sau schimbate în mod corespunzător pentru oricare dintre manevrele respective prin ajustarea legăturilor verzi cu modulul Rx, conform preferințelor personale ale utilizatorilor.
Precedent: Cum se modifică SMPS pentru curent reglabil și ieșire de tensiune În continuare: senzor de microunde sau un circuit senzor Doppler