În acest proiect, vom învăța cum să realizăm un circuit unipolar simplu de conducere a motorului pas cu pas folosind IC cu temporizator 555. În afară de temporizatorul 555, avem nevoie și de IC CD 4017, care este un contor de decenii IC.
De Ankit Negi
Orice motor unipolar poate fi conectat la acest circuit pentru a efectua sarcini specifice, deși trebuie mai întâi să faceți câteva mici modificări.
Viteza motorului pas cu pas poate fi controlată de la un potențiometru conectat între descărcare și prag pin de 555 temporizator .
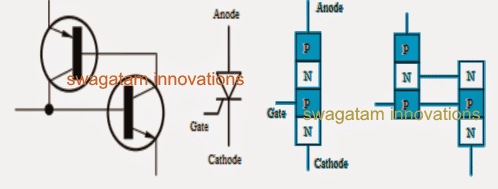
Bazele motorului pas cu pas
Motoarele pas cu pas sunt utilizate în zone în care este necesară o anumită cantitate de rotație, care nu poate fi realizată folosind motoare de curent continuu obișnuite. O aplicație tipică a motorului pas cu pas este într-o IMPRIMANTĂ 3D. Veți găsi două tipuri de motoare pas cu pas populare: UNIPOLAR și BIPOLAR.
După cum sugerează și numele, motorul pas cu pas unipolar conține înfășurări cu sârmă comună, care pot fi ușor energizate unul câte unul.
În timp ce motorul pas cu pas bipolar nu are un terminal comun între bobine, din cauza căruia nu poate fi acționat doar prin utilizarea circuitului propus. Pentru a acționa motorul pas cu pas bipolar avem nevoie de un circuit h-bridge.
COMPONENTE:
1. 555 TIMER IC

Două. CD 4017 IC

3. REZISTENTE 4.7K, 1K


4. POTENȚIOMETRU 220K

5. 1 uf CAPACITOR

6. 4 DIODE 1N4007

7. 4 TRANSISTORI 2N2222

8. MOTOR STEPPER UNIPOLAR

9. SURSA DE PUTERE DC
SCOPUL 555 TIMER:
Temporizatorul 555 este necesar aici pentru a genera impulsuri de ceas cu o anumită frecvență (poate fi variat folosind o potă de 220k) care determină viteza motorului pas cu pas.
Detalii IC 555 Pinout

SCOPUL CD4017:
După cum sa menționat deja mai sus, este un contor de deceniu IC, adică poate conta până la 10 impulsuri de ceas. Ceea ce face acest IC special este că are propriul decodor încorporat. Datorită cărora nu trebuie să adăugați un CI suplimentar pentru a decoda numerele binare.
4017 numără până la 10 impulsuri de ceas de la 555 ore și dă o ieșire mare corespunzătoare fiecărui impuls de ceas unul câte unul de la cei 10 pini de ieșire. La un moment dat, un singur ac este înalt.
SCOPUL TRANSISTORILOR:
Aici există două scopuri ale tranzistorului:
1. Tranzistoarele acționează ca întrerupătoare aici, energizând astfel câte o bobină la un moment dat.
2. Tranzistoarele permit trecerea de curent mare prin ele și apoi motor, excluzând astfel 555 temporizatorul complet, deoarece poate furniza o cantitate foarte mică de curent.
DIAGRAMA CIRCUITULUI:

Faceți conexiuni așa cum se arată în figură.
1. Conectați pinul 3 sau pinul de ieșire al temporizatorului 555 la pinul 14 (pinul de ceas) al IC 4017.
2. Conectați pinul de activare sau al 13-lea pin al 4017 la masă.
3. Conectați pinii 3,2,4,7 unul câte unul la tranzistoarele 1,2,3,4, respectiv.
4. Conectați 10 și 15 pini la masă printr-un rezistor de 1 k.
5. Conectați firul comun al motorului pas cu pas la pozitivul de alimentare.
6. Conectați alte fire ale motorului pas cu pas astfel încât bobinele să fie alimentate una câte una pentru a finaliza corect o rotație completă (puteți consulta fișa tehnică a motorului furnizată de producător)
DE CE PIN DE IEȘIRE 10 DIN IC 4017 ESTE CONECTAT LA PIN-ul 15 (RESET PIN)?
După cum sa menționat deja mai sus, 4017 numără impulsurile de ceas unul câte unul până la al 10-lea impuls de ceas și oferă o ieșire ridicată pe pinii de ieșire în consecință, fiecare pin de ieșire crește.
Acest lucru provoacă o anumită întârziere în rotația motorului, care este inutilă. Deoarece avem nevoie doar de primii patru pini pentru o rotație completă a motorului sau primele patru numere zecimale de la o la 3, pinul nr. 10 este conectat la pin15 astfel încât după al 4-lea număr IC se resetează și numărarea începe din nou de la început. Acest lucru asigură nicio întrerupere a rotației motorului.
LUCRU:
După efectuarea corectă a conexiunilor, dacă porniți circuitul, motorul va începe să se rotească în trepte. Timerul 555 produce impulsuri de ceas în funcție de valorile rezistorului, potențiometrului și condensatorului.
Dacă modificați valoarea oricăreia dintre aceste trei componente, frecvența pulsului ceasului se va schimba.
Aceste impulsuri de ceas sunt date IC CD 4017 care apoi numără impulsurile de ceas una câte una și dau 1 ca ieșire la pinul 3,2,4,7 respectiv și repetă continuu acest proces.
Deoarece tranzistorul Q1 este conectat la pinul 3, acesta pornește mai întâi apoi tranzistorul Q2 urmat de Q3 și Q4. Dar când un tranzistor este pornit, celelalte rămân oprite.
Când Q1 este pornit, acționează ca un comutator închis și curentul curge prin firul comun către firul 1 și apoi la masă prin tranzistorul Q1.
Aceasta energizează bobina 1 și motorul se rotește la un unghi care depinde de frecvența ceasului. Apoi, același lucru se întâmplă cu Q2 care energizează bobina 2 urmată de bobina 3 și bobina 4. Astfel se obține o revoluție completă.
Când potențiometrul este rotit:
Să presupunem că poziția inițială a vasului este de așa natură încât există o rezistență maximă (220k) între descărcare și știftul de prag. Formula pentru frecvența impulsului de ceas de ieșire este:
F = 1,44 / (R1 + 2R2) C1
Din formulă reiese clar că frecvența impulsurilor de ceas scade odată cu creșterea valorii R2. Astfel, atunci când valoarea R2 sau a potului este maximă, frecvența este minimă datorită căreia IC 4017 contează mai încet și oferă o ieșire mai întârziată.
Pe măsură ce valoarea rezistenței R2 scade, frecvența crește, ceea ce determină o întârziere minimă între ieșirile IC 4017. Prin urmare, motorul pas cu pas se rotește mai repede.
Astfel valoarea potențiometrului determină viteza motorului pas cu pas.
VIDEO SIMULARE:
Aici puteți vedea clar cum variază viteza motorului cu rezistența R2. Valoarea sa este mai întâi scăzută și apoi crescută, care la rândul său crește mai întâi și apoi scade viteza motorului pas cu pas.
Precedent: Cum funcționează lanterne cu manivelă Următorul: Circuitul tahometru Arduino pentru citiri precise