
După cum sugerează și numele, acest articol va oferi o idee precisă despre structura și funcționarea controlerului PID. Cu toate acestea, intrând în detalii, permiteți-ne să primim o introducere despre controlerele PID. Controlerele PID se găsesc într-o gamă largă de aplicații pentru controlul proceselor industriale. Aproximativ 95% din operațiunile în buclă închisă ale automatizare industriala sectorul utilizează controlere PID. PID înseamnă Proporțional-Integral-Derivat. Aceste trei controlere sunt combinate în așa fel încât să producă un semnal de control. Ca un controler de feedback, acesta furnizează ieșirea de control la nivelurile dorite. Înainte de a fi inventate microprocesoarele, controlul PID a fost implementat de componentele electronice analogice. Dar astăzi toate controlerele PID sunt procesate de microprocesoare. Controlere logice programabile de asemenea, aveți instrucțiunile incorporate ale controlerului PID. Datorită flexibilității și fiabilității controlerelor PID, acestea sunt utilizate în mod tradițional în aplicațiile de control al proceselor.
Ce este un controler PID?
Termenul PID înseamnă derivată integrală proporțională și este un tip de dispozitiv utilizat pentru a controla diferite variabile de proces, cum ar fi presiunea, debitul, temperatura și viteza în aplicațiile industriale. În acest controler, un dispozitiv de feedback buclă de control este utilizat pentru a regla toate variabilele procesului.
Acest tip de control este utilizat pentru a conduce un sistem în direcția unei locații obiective altfel nivel. Este aproape peste tot pentru controlul temperaturii și este utilizat în procese științifice, automatizări și o multitudine de produse chimice. În acest controler, feedback-ul în buclă închisă este utilizat pentru a menține ieșirea reală dintr-o metodă apropiată de obiectiv, altfel ieșire la punctul fix, dacă este posibil. În acest articol, sunt discutate proiectarea controlerului PID cu modurile de control utilizate în acestea, cum ar fi P, I & D.
Istorie
Istoria controlerului PID este, în anul 1911, primul controler PID a fost dezvoltat de Elmer Sperry. După aceea, TIC (Taylor Instrumental Company) a fost implementat un fost controler pneumatic complet reglabil în anul 1933. După câțiva ani, inginerii de control au eliminat eroarea de staționare care se găsește în controlerele proporționale prin reglarea finalului la o valoare falsă până când eroarea nu a fost zero.
Această reglare a inclus eroarea care este cunoscută sub numele de controlor proporțional-integral. După aceea, în anul 1940, primul controler PID pneumatic a fost dezvoltat printr-o acțiune derivată pentru a reduce problemele de depășire.
În 1942, Ziegler & Nichols au introdus reguli de reglare pentru a descoperi și seta parametrii adecvați ai controlerelor PID de către ingineri. În cele din urmă, la mijlocul anului 1950, controlerele automate PID au fost utilizate pe scară largă în industrii.
Diagrama blocului controlerului PID
Un sistem cu buclă închisă, precum un controler PID, include un sistem de control al feedback-ului. Acest sistem evaluează variabila de feedback folosind un punct fix pentru a genera un semnal de eroare. Pe baza acestui fapt, modifică ieșirea sistemului. Această procedură va continua până când eroarea va ajunge la zero, altfel valoarea variabilei de feedback devine echivalentă cu un punct fix.
Acest controler oferă rezultate bune în comparație cu controlerul de tip ON / OFF. În controlerul de tip ON / OFF, sunt disponibile doar două condiții pentru gestionarea sistemului. Odată ce valoarea procesului este mai mică decât punctul fix, atunci va porni. În mod similar, se va opri odată ce valoarea este mai mare decât o valoare fixă. Ieșirea nu este stabilă în acest tip de controler și va oscila frecvent în regiunea punctului fix. Cu toate acestea, acest controler este mai stabil și mai precis în comparație cu controlerul de tip ON / OFF.

Funcționarea controlerului PID
Funcționarea controlerului PID
Cu utilizarea unui controler ON-OFF simplu cu cost redus, sunt posibile doar două stări de control, cum ar fi complet ON sau OFF complet. Este utilizat pentru o aplicație de control limitată în care aceste două stări de control sunt suficiente pentru obiectivul de control. Cu toate acestea, natura oscilantă a acestui control limitează utilizarea acestuia și, prin urmare, este înlocuită de controlere PID.
Controlerul PID menține ieșirea astfel încât să existe o eroare zero între variabila de proces și valoarea de referință / ieșirea dorită prin operații cu buclă închisă. PID utilizează trei comportamente de control de bază care sunt explicate mai jos.
P- Controler
Controlorul proporțional sau P- oferă o ieșire care este proporțională cu eroarea curentă e (t). Compară punctul dorit sau setat cu valoarea reală sau valoarea procesului de feedback. Eroarea rezultată este înmulțită cu o constantă proporțională pentru a obține ieșirea. Dacă valoarea erorii este zero, atunci această ieșire a controlerului este zero.

P-controler
Acest controler necesită polarizare sau resetare manuală atunci când este utilizat singur. Acest lucru se datorează faptului că nu atinge niciodată starea de echilibru. Oferă o funcționare stabilă, dar menține întotdeauna eroarea de staționare. Viteza răspunsului crește atunci când crește constantă proporțională Kc.

Răspunsul controlerului P
I-Controller
Datorită limitării controlerului p, unde există întotdeauna un decalaj între variabila de proces și setpoint, este necesar controlerul I, care oferă acțiunea necesară pentru a elimina eroarea la starea de echilibru. Acesta integrează eroarea pe o perioadă de timp până când valoarea erorii ajunge la zero. Păstrează valoarea dispozitivului de control final la care eroarea devine zero.

Controler PI
Controlul integral își reduce producția atunci când are loc o eroare negativă. Limită viteza de răspuns și afectează stabilitatea sistemului. Viteza răspunsului este mărită prin scăderea câștigului integral, Ki.

Răspunsul controlerului PI
În figura de mai sus, pe măsură ce câștigul controlerului I scade, eroarea la starea de echilibru continuă să scadă. În majoritatea cazurilor, controlerul PI este utilizat în special în cazul în care răspunsul de mare viteză nu este necesar.
În timp ce utilizați controlerul PI, ieșirea I-controller este limitată la o anumită gamă pentru a depăși lichidare integrală condiții în care ieșirea integrală crește chiar și la starea de eroare zero, din cauza neliniarităților din instalație.
Controler D
I-controller nu are capacitatea de a prezice comportamentul viitor al erorii. Deci, reacționează normal odată ce punctul de referință este modificat. Controlerul D depășește această problemă anticipând comportamentul viitor al erorii. Rezultatul său depinde de rata de schimbare a erorii în raport cu timpul, înmulțită cu constanta derivată. Oferă startul inițial pentru ieșire, crescând astfel răspunsul sistemului.

Controler PID
În răspunsul din figura de mai sus a lui D, controlerul este mai mare, în comparație cu controlerul PI și, de asemenea, timpul de stabilire a ieșirii este scăzut. Îmbunătățește stabilitatea sistemului prin compensarea decalajului de fază cauzat de I-controller. Creșterea câștigului derivat crește viteza de răspuns.

Răspunsul controlerului PID
Deci, în cele din urmă, am observat că, combinând aceste trei controlere, putem obține răspunsul dorit pentru sistem. Diferiti producatori proiecteaza algoritmi PID diferiti.
Tipuri de controler PID
Controlerele PID sunt clasificate în trei tipuri, cum ar fi controlerele ON / OFF, proporționale și standard. Aceste controlere sunt utilizate pe baza sistemului de control, utilizatorul poate fi utilizat controlerul pentru a reglementa metoda.
Control ON / OFF
O metodă de control on-off este cel mai simplu tip de dispozitiv utilizat pentru controlul temperaturii. Ieșirea dispozitivului poate fi PORNIT / OPRIT fără nicio stare centrală. Acest controler va porni PORNITUL de ieșire pur și simplu odată ce temperatura traversează punctul fix. Un controler de limită este un anumit tip de controler ON / OFF care utilizează un releu de blocare. Acest releu este resetat manual și utilizat pentru a opri o metodă odată ce se atinge o anumită temperatură.
Control proporțional
Acest tip de controler este conceput pentru a elimina ciclul care este conectat prin controlul ON / OFF. Acest controler PID va reduce puterea normală care este furnizată către încălzitor odată ce temperatura atinge punctul fix.
Acest controler are o caracteristică pentru a controla încălzitorul, astfel încât să nu depășească punctul fix, totuși va ajunge la punctul fix pentru a menține o temperatură constantă.
Acest act de proporționare poate fi realizat prin pornirea și oprirea ieșirii pentru perioade mici de timp. Această proporție de timp va schimba raportul de la timpul ON la OFF timp pentru controlul temperaturii.
Controler PID de tip standard
Acest tip de controler PID va îmbina controlul proporțional prin control integral și derivat pentru a ajuta automat unitatea să compenseze modificările din sistem. Aceste modificări, integrale și derivate, sunt exprimate în unități bazate pe timp.
Aceste controlere sunt, de asemenea, menționate prin reciprocele lor, RATE & RESET în mod corespunzător. Termenii PID trebuie să fie reglați separat, altfel reglați la un anumit sistem cu încercarea, precum și cu eroarea. Aceste controlere vor oferi cel mai precis și constant control al celor 3 tipuri de controlere.
Controlere PID în timp real
În prezent, există diferite tipuri de controlere PID disponibile pe piață. Aceste controlere sunt utilizate pentru cerințe de control industrial precum presiunea, temperatura, nivelul și debitul. Odată ce acești parametri sunt controlați prin PID, opțiunile cuprind un controler PID separat sau fie un PLC.
Aceste controlere separate sunt utilizate ori de câte ori este necesar să fie verificate una, altfel două bucle, precum și controlate în alt mod, în condițiile în care este complex la dreapta de intrare prin sisteme mai mari.
Aceste dispozitive de control oferă opțiuni diferite pentru controlul solo și twin loop. Controlerele PID de tip independent oferă mai multe configurații cu punct fix pentru a produce mai multe alarme autonome.
Aceste controlere independente cuprind în principal controlere PID de la Honeywell, controlere de temperatură de la Yokogawa, controlere de reglare automată de la controlere OMEGA, Siemens și ABB.
PLC-urile sunt utilizate ca controlere PID în majoritatea aplicațiilor de control industrial. Aranjarea blocurilor PID se poate face în PAC-uri sau PLC-uri pentru a oferi alegeri superioare pentru un control PLC exact. Aceste controlere sunt mai inteligente și puternice în comparație cu controlere separate. Fiecare PLC include blocul PID în cadrul programării software.
Metode de reglare
Înainte de a avea loc funcționarea controlerului PID, acesta trebuie reglat pentru a se potrivi cu dinamica procesului de controlat. Proiectanții dau valorile implicite pentru termenii P, I și D, iar aceste valori nu au putut oferi performanța dorită și uneori duc la instabilitate și performanțe de control lente. Diferite tipuri de metode de reglare sunt dezvoltate pentru a regla controlerele PID și necesită multă atenție din partea operatorului pentru a selecta cele mai bune valori ale câștigurilor proporționale, integrale și derivate. Unele dintre acestea sunt prezentate mai jos.
Controlerele PID sunt utilizate în majoritatea aplicațiilor industriale, dar ar trebui să știți setările acestui controler pentru a-l regla corect pentru a genera ieșirea preferată. Aici, reglarea nu este altceva decât procedura de a primi un răspuns ideal de la controler prin setarea celor mai bune câștiguri proporționale, factori integrali și derivativi.
Ieșirea dorită a controlerului PID poate fi obținută prin reglarea controlerului. Există diferite tehnici disponibile pentru a obține ieșirea necesară de la controler, cum ar fi încercarea și eroarea, Zeigler-Nichols și curba de reacție a procesului. Cele mai frecvent utilizate metode sunt trial & error, Zeigler-Nichols etc.
Metodă de încercare și eroare: Este o metodă simplă de reglare a controlerului PID. În timp ce sistemul sau controlerul funcționează, îl putem regla. În această metodă, mai întâi, trebuie să setăm valorile Ki și Kd la zero și să creștem termenul proporțional (Kp) până când sistemul atinge un comportament oscilant. Odată ce este oscilant, reglați Ki (termen integral) astfel încât oscilațiile să se oprească și în cele din urmă reglați D pentru a obține un răspuns rapid.
Tehnica curbei de reacție a procesului: Este o tehnică de reglare în buclă deschisă. Produce un răspuns atunci când o intrare pas este aplicată sistemului. Inițial, trebuie să aplicăm manual o ieșire de control sistemului și să înregistrăm curba de răspuns.
După aceea, trebuie să calculăm panta, timpul mort, timpul de creștere al curbei și, în cele din urmă, să înlocuim aceste valori în ecuațiile P, I și D pentru a obține valorile de câștig ale termenilor PID.

Curba de reacție a procesului
Metoda Zeigler-Nichols: Zeigler-Nichols a propus metode în buclă închisă pentru reglarea controlerului PID. Acestea sunt metoda ciclului continuu și metoda de oscilație amortizată. Procedurile pentru ambele metode sunt aceleași, dar comportamentul oscilației este diferit. În aceasta, mai întâi, trebuie să setăm constanta controlerului p, Kp la o anumită valoare, în timp ce valorile Ki și Kd sunt zero. Câștigul proporțional este crescut până când sistemul oscilează la o amplitudine constantă.
Câștigul la care sistemul produce oscilații constante se numește câștig final (Ku), iar perioada de oscilații se numește perioada finală (Pc). Odată ce este atins, putem introduce valorile P, I și D în controlerul PID de către Zeigler-Nichols, tabelul depinde de controlerul utilizat, cum ar fi P, PI sau PID, așa cum se arată mai jos.

Masa Zeigler-Nichols
Structura controlerului PID
Controlerul PID constă din trei termeni, și anume control proporțional, integral și derivat. Funcționarea combinată a acestor trei controlere oferă o strategie de control pentru controlul procesului. Controlerul PID manipulează variabilele procesului, cum ar fi presiunea, viteza, temperatura, debitul etc. Unele aplicații utilizează controlere PID în rețele în cascadă unde sunt utilizate două sau mai multe PID pentru a realiza controlul.

Structura controlerului PID
Figura de mai sus prezintă structura controlerului PID. Acesta constă dintr-un bloc PID care dă rezultatul blocului de proces. Procesul / instalația constă din dispozitive de control final, cum ar fi actuatoare, supape de control și alte dispozitive de control pentru controlul diferitelor procese din industrie / instalație.
Un semnal de feedback de la instalația de procesare este comparat cu un punct de referință sau un semnal de referință u (t), iar semnalul de eroare corespunzător e (t) este alimentat algoritmului PID. Conform calculelor de control proporțional, integral și derivat din algoritm, controlerul produce un răspuns combinat sau o ieșire controlată care se aplică dispozitivelor de control ale instalației.
Toate aplicațiile de control nu au nevoie de toate cele trei elemente de control. Combinații precum comenzile PI și PD sunt foarte des utilizate în aplicații practice.
Aplicații
Aplicațiile controlerului PID includ următoarele.
Cea mai bună aplicație de control PID este controlul temperaturii, în care controlerul utilizează o intrare a unui senzor de temperatură și ieșirea acestuia poate fi aliată unui element de control, cum ar fi un ventilator sau un încălzitor. În general, acest controler este pur și simplu un element într-un sistem de control al temperaturii. Întregul sistem trebuie examinat și luat în considerare la alegerea controlerului potrivit.
Controlul temperaturii cuptorului
În general, cuptoarele sunt utilizate pentru a include încălzirea, precum și pentru a deține o cantitate imensă de materie primă la temperaturi uriașe. Este obișnuit ca materialul ocupat să includă o masă uriașă. În consecință, este nevoie de o cantitate mare de inerție și temperatura materialului nu se modifică rapid chiar și atunci când se aplică căldură imensă. Această caracteristică are ca rezultat un semnal PV moderat stabil și permite perioadei derivate să corecteze în mod eficient defecțiunile fără modificări extreme nici la FCE, nici la CO.
Controler de încărcare MPPT
Caracteristica V-I a unei celule fotovoltaice depinde în principal de intervalul de temperatură, precum și de iradiere. Pe baza condițiilor meteorologice, curentul și tensiunea de funcționare se vor schimba constant. Deci, este extrem de semnificativ să urmăriți cel mai înalt PowerPoint al unui sistem fotovoltaic eficient. Controlerul PID este folosit pentru a găsi MPPT, oferind puncte de tensiune și curent fixe controlerului PID. Odată schimbată starea vremii, trackerul menține curentul și tensiunea stabilă.
Convertorul de electronice de putere
Știm că convertorul este o aplicație de electronică de putere, deci un controler PID este utilizat în cea mai mare parte în convertoare. Ori de câte ori un convertor este aliat printr-un sistem bazat pe schimbarea din sarcină, atunci ieșirea convertorului va fi modificată. De exemplu, un invertor este aliat cu sarcina, curentul uriaș este furnizat odată cu creșterea sarcinilor. Astfel, parametrul tensiunii, precum și curentul nu este stabil, dar se va modifica în funcție de cerință.
În această stare, acest controler va genera semnale PWM pentru a activa IGBT-urile invertorului. Pe baza modificării din sarcină, semnalul de răspuns este furnizat controlerului PID, astfel încât să producă n eroare. Aceste semnale sunt generate pe baza semnalului de eroare. În această stare, putem obține intrări și ieșiri modificabile printr-un invertor similar.
Aplicarea controlerului PID: Control buclă închisă pentru un motor DC fără perii
Interfața controlerului PID
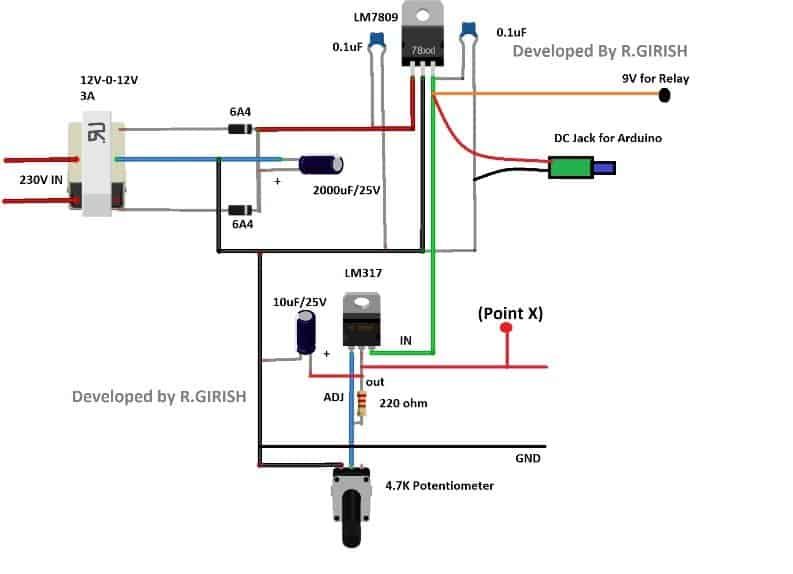
Proiectarea și interfațarea controlerului PID se poate face folosind microcontrolerul Arduino. În laborator, controlerul PID bazat pe Arduino este proiectat folosind placa Arduino UNO, componente electronice, răcitor termoelectric, în timp ce limbajele de programare software utilizate în acest sistem sunt C sau C ++. Acest sistem este utilizat pentru a controla temperatura din laborator.
Parametrii PID pentru un controler specific sunt găsiți fizic. Funcția diferiților parametri PID poate fi implementată prin contrastul ulterior între diferite forme de controlere.
Acest sistem de interfață poate calcula în mod eficient temperatura printr-o eroare de ± 0,6 ℃, în timp ce o temperatură constantă reglează printr-o mică diferență față de valoarea preferată. Conceptele utilizate în acest sistem vor oferi tehnici ieftine, precum și exacte pentru a gestiona parametrii fizici într-un interval preferat în cadrul laboratorului.
Astfel, acest articol discută o prezentare generală a controlerului PID care include istoric, diagramă bloc, structură, tipuri, funcționare, metode de reglare, interfață, avantaje și aplicații. Sperăm că am putut oferi cunoștințe de bază, dar precise despre controlerele PID. Iată o întrebare simplă pentru voi toți. Dintre diferitele metode de reglare, care metodă este utilizată de preferință pentru a obține o funcționare optimă a controlerului PID și de ce?
Vi se solicită să vă dați răspunsurile cu amabilitate în secțiunea de comentarii de mai jos.
Credite foto
Diagrama bloc a controlerului PID de wikimedia
Structura controlerului PID, controlerul P, controlorul P - răspuns și controlerul PID de blog.controle optice
P - răspunsul controlerului de către controls.engin.umich
PI- răspunsul controlerului de către m. mănâncă
Răspunsul controlerului PID de wikimedia
Masă Zeigler-Nichols de controls.engin








{kind=link}
{kind=link}
{kind=link}
{kind=link}