Articolul prezintă un design simplu al circuitului de scuter electric, care poate fi, de asemenea, modificat pentru a face o auto-ricșă electrică. Ideea a fost cerută de domnul Steve.
Cererea de circuit
Am avut norocul să vă găsesc blogul, lucruri cu adevărat uimitoare pe care ați reușit să le proiectați.
Caut o DC to DC Step Up și controler pentru motorul scuterului electric
Intrare: Baterie SLA (sigilată-plumb-acid) de 12V, care este încărcată ~ 13,5V
tensiune minimă - întrerupere la ~ 10,5V
Ieșire: motor 60V DC 1000W.
Ai dat peste un astfel de circuit?
Îmi pot imagina că va fi de tip push-pull, dar nu am nicio idee despre tipurile de mosfete (dați puterea 80-100A), conducându-le, apoi transformatorul, tipul de bază și apoi diodele.
În plus, tensiunea minimă întreruptă pentru a limita ciclul de funcționare al PWM.
Am mai găsit câteva informații. Motorul este trifazat fără perii cu senzori hol.
Există două modalități de abordare, a / lăsați controlerul existent la locul lui și faceți doar 12V până la 60V intensificați sau b / înlocuiți și controlerul.
Nu va exista nicio diferență în ceea ce privește eficiența energetică, controlerului pur și simplu comută care fază obține curent pe baza senzorilor din sală. Prin urmare, respectând planul a.
Mulțumesc foarte mult,
Steve

Design-ul
Astăzi, fabricarea unui vehicul electric este mult mai ușoară decât înainte, iar acest lucru a devenit posibil datorită a două elemente principale din design, și anume motoarele BLDC și bateriile Li-ion sau Li-polimer.
Acești doi membri ultra eficienți au permis fundamental ca conceptul de vehicule electrice să devină realitate și practic fezabil.
De ce BLDC Motor
Motorul BLDC sau motorul fără perii este eficient deoarece este proiectat să funcționeze fără contacte fizice, cu excepția rulmenților cu bile ai arborelui.
La motoarele BLDC, rotorul se rotește numai prin forța magnetică, ceea ce face sistemul extrem de eficient, spre deosebire de motoarele cu perii anterioare, care aveau rotoarele atașate la sursa de alimentare prin perii, provocând o mulțime de frecare, scântei și uzură în sistem.
De ce bateria Li-Ion
Pe linii similare, odată cu apariția mult actualizate a bateriilor Li-ion și a bateriilor Lipo astăzi, realizarea electricității din baterii nu mai este considerată un concept ineficient.
Mai devreme, aveam la dispoziție doar baterii cu plumb acid pentru toate sistemele de rezervă DC, care reprezentau două dezavantaje majore: acești omologi aveau nevoie de mult timp pentru încărcare, aveau o rată limitată de descărcare, o durată de viață mai mică și erau voluminoase și grele, toate acestea adăugând doar la natura lor ineficientă a muncii.
În opoziție cu aceasta, liniile Li-ion sau Li-po sunt mai ușoare, compacte, se pot încărca rapid la rate mari de curent și sunt descărcabile la orice rată mare de curent dorită, acestea au o durată de viață mai mare, sunt tipuri SMF, toate aceste caracteristici făcându-le candidat potrivit pentru aplicații precum trotinete electrice, ricșe electrice, drone quadcopter etc.
Deși motoarele BLDC sunt extrem de eficiente, acestea necesită circuite integrate specializate pentru acționarea bobinelor lor statorice, astăzi avem mulți producători care produc aceste module exclusive IC de generația următoare, care nu numai că îndeplinesc funcția de bază a acționării acestor motoare, dar sunt, de asemenea, specificate cu multe alte funcții avansate. caracteristici, cum ar fi: control PWM cu buclă deschisă, control cu buclă închisă asistat de senzor, mai multe garanții infailibile, control inversare / avansare a motorului, control al frânării și o multitudine de alte caracteristici de ultimă generație.
Utilizarea unui circuit de driver BLDC
Am discutat deja un astfel de cip excelent în postarea mea anterioară, special conceput pentru manipularea motoarelor BLDC de mare putere, este MC33035 IC de la Motorola.
Să învățăm modul în care acest modul poate fi implementat în mod eficient pentru a face un scuter electric sau o ricșă electrică, chiar acasă.
Nu voi discuta detaliile mecanice ale vehiculului, ci mai degrabă doar circuitul electric și detaliile de cablare ale sistemului.
Diagrama circuitului

Lista de componente
Toate rezistențele, inclusiv Rt, dar cu excepția Rs și R = 4k7, 1/4 watt
Ct = 10nF
Potențiometru de viteză = 10K Liniar
BJT de putere superioară = TIP147
Mosfete inferioare = IRF540
Rs = 0,1 / capacitatea maximă a curentului statorului
R = 1K
C = 0,1uF
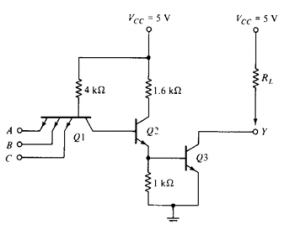
Figura de mai sus prezintă un motor de curent continuu trifazat fără perii, cu putere mare, cu curent continuu, IC MC33035, care devine perfect potrivit pentru scuterele electrice sau aplicația de ricșă electrică propusă.
Dispozitivul are toate caracteristicile de bază care ar putea fi de așteptat să fie în aceste vehicule și, dacă este necesar, IC-ul ar putea fi îmbunătățit cu caracteristici avansate suplimentare prin multe configurații posibile alternative.
Funcțiile avansate devin posibile în mod specific atunci când cipul este configurat într-un mod în buclă închisă, totuși aplicația discutată este o configurație în buclă deschisă, care este o configurație mai preferată, deoarece este mult mai ușor de configurat și totuși este capabilă să îndeplinească toate caracteristicile necesare care poate fi de așteptat într-un vehicul electric.
Am discutat deja funcțiile pinout ale acestui cip în capitolul anterior, să rezumăm același lucru și, de asemenea, să înțelegem cum poate fi necesară implementarea exactă a CI de mai sus pentru realizarea diferitelor operațiuni implicate într-un vehicul electric.
Cum funcționează IC
Secțiunea umbrită verde este în sine MC 33035 IC, care arată toate circuitele sofisticate încorporate încorporate în interiorul cipului și ceea ce îl face atât de avansat cu performanțele sale.
Porțiunea galbenă umbrită este motorul, care include un stator trifazat indicat de cele trei bobine din configurația „Delta”, rotorul circular indicat cu magneții cu poli N / S și trei senzori de efect Hall în partea de sus.
Semnalele de la cei trei senzori de efect Hall sunt alimentate la pin-urile 4, 5, 6 ale IC-ului pentru procesarea internă și generarea secvenței de comutare corespunzătoare a ieșirii pe dispozitivele de putere de ieșire conectate.
Funcții Pinout și controale
Pinouturile 2, 1 și 24 controlează dispozitivele de putere superioare configurate extern, în timp ce pinii 19, 20, 21 sunt alocați pentru a controla dispozitivele de alimentare din seria inferioară complementare. care controlează împreună motorul automobil BLDC conectat conform diferitelor comenzi alimentate.
Deoarece IC-ul este configurat într-un mod de buclă deschisă, ar trebui să fie activat și controlat folosind semnale PWM externe, al căror ciclu de funcționare ar trebui să determine viteza motorului.
Cu toate acestea, acest CI inteligent nu necesită un circuit extern pentru generarea PWM-urilor, ci mai degrabă este gestionat de un oscilator încorporat și de câteva circuite de amplificare a erorilor.
Componentele Rt și Ct sunt selectate corespunzător pentru generarea frecvenței (20 până la 30 kHz) pentru PWM-uri, care este alimentată la pinul 10 al IC-ului pentru procesare ulterioară.
Cele de mai sus se realizează printr-o tensiune de alimentare de 5V generată de IC-ul însuși la pinul 8, această sursă este utilizată simultan pentru alimentarea dispozitivelor cu efect Hall, se pare că totul se face exact aici .... nimic nu este irosit.
Porțiunea umbrită în roșu formează secțiunea de control a vitezei a configurației, așa cum se poate observa, este făcută pur și simplu folosind un singur potențiometru obișnuit .... împingându-l în sus crește viteza și invers. La rândul său, acest lucru este posibil prin ciclurile de funcționare PWM variabile în mod corespunzător de pe pinul # 10, 11, 12, 13 .
Potențiometrul ar putea fi transformat într-un circuit de asamblare LDR / LED, pentru a obține un control al vitezei pedalei fără frecare în vehicul.
Pinul 3 este pentru determinarea direcției înainte, inversă a rotației motorului, sau mai degrabă a scuterului sau a direcției de ricșă. Aceasta implică faptul că acum scuterul tău electric sau ricșa ta electrică vor avea posibilitatea de a inversa înapoi .... doar imaginează-ți un vehicul cu două roți cu o instalație de mers înapoi, ..... interesant?
Pinul 3 poate fi văzut cu un comutator, închiderea acestui comutator face pinul # 3 la masă permițând o mișcare „înainte” către motor, în timp ce deschiderea face ca motorul să se rotească în direcția opusă (pinul 3 are un rezistor intern de tragere, astfel încât deschiderea comutatorul nu cauzează nimic în detrimentul CI).
În mod identic, comutatorul pin # 22 selectează răspunsul semnalului de schimbare de fază a motorului conectat, acest comutator trebuie să fie pornit sau oprit în mod corespunzător cu referire la specificațiile motorului, dacă este utilizat un motor cu fază de 60 de grade, atunci comutatorul trebuie să rămână închis , și deschis pentru un motor cu fază de 120 de grade.
Pinul # 16 este pinul de masă al CI și trebuie conectat la linia negativă a bateriei și / sau la linia de masă comună asociată sistemului.
Pinul # 17 este Vcc sau pinul de intrare pozitiv, acest pin trebuie conectat la o tensiune de alimentare între 10V și 30V, 10V fiind valoarea minimă și 30V limita maximă de defecțiune pentru IC.
Pinul # 17 poate fi integrat cu „Vm” sau linia de alimentare a motorului dacă specificațiile de alimentare ale motorului se potrivesc cu specificațiile IC Vcc, altfel pin17 ar putea fi furnizat dintr-o etapă separată a regulatorului.
Pinul # 7 este pinout-ul „activate” al IC-ului, acest pin poate fi văzut terminat la masă printr-un comutator, atât timp cât este pornit și pinul # 7 rămâne împământat, motorul este lăsat să rămână activ, când este oprit, motorul este dezactivat, rezultând motorul spre coastă până când se oprește în cele din urmă. Modul de coastare se poate opri rapid dacă motorul sau vehiculul sunt sub o anumită sarcină.
Pinul # 23 i se atribuie capacitatea de „frânare” și determină oprirea și oprirea motorului aproape instantaneu când comutatorul asociat este deschis. Motorul este permis să funcționeze normal atâta timp cât acest comutator este ținut închis și pinul # 7 este ținut la pământ.
Aș recomanda să conectați comutatorul la pinul 7 (activare) și pinul 23 (frână) împreună, astfel încât acestea să fie comutate cu o acțiune dublă și împreună, acest lucru ar ajuta probabil la „uciderea” rotației motorului în mod eficient și colectiv și, de asemenea, permite motorului să funcționeze cu un semnal combinat de la cele două pnouts.
„Rs” formează rezistorul de sens responsabil pentru verificarea supraîncărcării sau a condițiilor de supracurent pentru motor, în astfel de situații. starea „defecțiune” este declanșată instantaneu, oprind imediat motorul și IC-ul intrând într-un mod de blocare intern. Starea rămâne în acest mod până când eroarea este corectată și normalitatea este restabilită.
Aceasta încheie explicația detaliată cu privire la diferitele pinouts ale pinouturilor propuse pentru modulul de control al scuterului electric / ricșă. Trebuie doar să fie implementat corect conform informațiilor de conexiune afișate în diagramă pentru implementarea cu succes și în siguranță a operațiunilor vehiculului.
În plus, IC MC33035 include, de asemenea, câteva funcții de protecție încorporate, cum ar fi blocarea sub volatge, care asigură oprirea vehiculului în cazul în care IC-ul este inhibat de la tensiunea minimă de alimentare necesară și, de asemenea, o protecție termică la suprasarcină care asigură că IC nu funcționează niciodată cu temperaturi peste.
Cum se conectează bateria (sursa de alimentare)
Conform cererii, vehiculul electric este specificat să funcționeze cu o intrare de 60V, iar utilizatorul solicită o convertor boost pentru a obține acest nivel mai ridicat de tensiune de la o baterie mai mică de 12V sau de 24V.
Cu toate acestea, adăugarea unui convertor boost ar putea face inutil circuitul mai complex și ar putea spori o posibilă ineficiență. Ideea mai bună este să folosiți 5No de baterii de 12V în serie. Pentru un timp și un curent suficient de rezervă pentru motorul de 1000 wați, fiecare baterie poate fi evaluată la 25AH sau mai mult.
Cablarea bateriilor poate fi implementată prin referirea la următoarele detalii de conectare:

Precedent: Circuit controler motor fără perii de mare putere În continuare: Cum funcționează convertoarele Boost