
Introducere:
În prezent, multe industrii folosesc roboți datorită nivelului ridicat de performanță și fiabilitate și care este de mare ajutor pentru ființe umane. Robotica de evitare a obstacolelor este utilizată pentru detectarea obstacolelor și evitarea coliziunii. Acesta este un robot autonom. Proiectarea robotului de evitare a obstacolelor necesită integrarea multor senzori în funcție de sarcina lor.
Detectarea obstacolelor este cerința principală a acestui robot autonom. Robotul primește informațiile din zona înconjurătoare prin senzori montați pe robot. Unele dispozitive de detectare utilizate pentru detectarea obstacolelor, cum ar fi senzorii de lovire, senzorii cu infraroșu, senzorii cu ultrasunete, etc.

Vehicul robot de evitare a obstacolelor
Principiul de funcționare:
Evitarea obstacolelor vehicul robotizat folosește senzori cu ultrasunete pentru mișcările sale. Pentru a realiza operația dorită se folosește un microcontroler de 8051 familii. Motoarele sunt conectate prin intermediul driverului IC al microcontrolerului. Senzorul cu ultrasunete este atașat în fața robotului.
Ori de câte ori robotul merge pe calea dorită, senzorul ultrasonic transmite undele ultrasonice continuu de la capul senzorului său. Ori de câte ori un obstacol iese în față, undele ultrasonice sunt reflectate de la un obiect și acele informații sunt transmise microcontrolerului. Microcontrolerul controlează motoarele stânga, dreapta, spate, față, pe baza semnalelor ultrasonice. Pentru a controla viteza fiecărei modulații a lățimii impulsului motorului se utilizează (PWM).

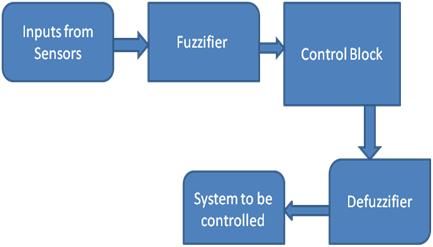
Diagrama blocului Vehicul robot de evitare a obstacolelor
Senzori diferiți folosiți pentru evitarea obstacolelor Vehicul robotizat
1. Detectarea obstacolelor (senzor IR):
Senzorii IR sunt utilizați pentru detectarea obstacolelor. Semnalul de ieșire al senzorului se trimite la microcontroler. Microcontrolerul controlează vehiculul (înainte / înapoi / oprire) utilizând motorul de curent continuu care este plasat în vehicul. Dacă vreun obstacol plasat în linie, senzorul IR nu primește razele de lumină și dă semnale microcontrolerului. Microcontrolerul va opri vehiculul imediat și sirena va porni. După un minut, robotul va verifica starea traseului dacă este eliminat un obstacol, robotul se deplasează departe, altfel robotul va reveni la locul de plecare. Senzorul detectează obiecte emițând o explozie ultrasonică scurtă și apoi ascultând eco. Sub controlul unui microcontroler gazdă, senzorul emite o explozie scurtă de 40 kHz. Această explozie se aventurează sau se deplasează prin aer și lovește un articol și după aceea ricoșează din nou către senzor. Senzorul furnizează un impuls de ieșire către gazdă care se va termina atunci când ecoul este detectat, prin urmare lățimea unui impuls către următorul este luată în calcul de către un program pentru a oferi rezultate la distanță de obiect.
Două. Detectare cale (senzor de proximitate):
Cauza normală, ambii senzori care oferă liniile directoare și robotul îl urmează mergând direct pe cale. Când linia se termină în acel moment robotul se întoarce la 180 și se întoarce în același loc.

Fiind on-line
Senzorii de proximitate sunt utilizați pentru detectarea căii. Când senzorul din dreapta nu este detectat în linia curbei, microcontrolerul activează motorul din stânga pentru a roti la stânga până la semnalul din senzorul din dreapta. Odată ce semnalul este detectat senzorul corect, cele două motoare sunt activate pentru a merge înainte. Când linia se termină în acel moment robotul se întoarce la 180 și se întoarce în același loc.

Pierderea liniei
3. Senzor cu ultrasunete:
Senzorul cu ultrasunete este utilizat pentru detectarea obstacolelor. Senzorul cu ultrasunete transmite undele ultrasonice din capul senzorului și primește din nou undele ultrasonice reflectate de la un obiect.
Există multe aplicații care utilizează senzori cu ultrasunete, cum ar fi sisteme de alarmă de instrucțiuni, deschizători automați de uși etc. Senzorul cu ultrasunete este foarte compact și are o performanță foarte ridicată.

Diagrama generală a senzorului cu ultrasunete
Principiul de funcționare:
Senzorul cu ultrasunete emite semnalul scurt și de înaltă frecvență. Acestea se propagă în aer cu viteza sunetului. Dacă lovesc orice obiect, atunci reflectă un semnal de ecou către senzor. Senzorul cu ultrasunete este format dintr-un multivibrator, fixat pe bază. Multivibratorul este o combinație între un rezonator și un vibrator. Rezonatorul furnizează unde ultrasonice generate de vibrații. Senzorul cu ultrasunete este format din două părți, emițătorul care produce o undă sonoră de 40 kHz, iar detectorul detectează o undă sonoră de 40 kHz și trimite un semnal electric înapoi la microcontroler.

Principiul de lucru cu ultrasunete
Senzorul cu ultrasunete permite robotului să vadă și să recunoască practic un obiect, să evite obstacolele, să măsoare distanța. Gama de funcționare a senzorului cu ultrasunete este de 10 cm până la 30 cm.
Funcționarea senzorului cu ultrasunete:
Când un impuls electric de înaltă tensiune este aplicat traductorului cu ultrasunete acesta vibrează pe un spectru specific de frecvențe și generează o explozie de unde sonore. Ori de câte ori apare un obstacol în fața senzorului ultrasonic, undele sonore se vor reflecta sub formă de ecou și generează un impuls electric. Calculează timpul necesar între trimiterea undelor sonore și primirea ecoului. Modelele de ecou vor fi comparate cu modelele undelor sonore pentru a determina starea semnalului detectat.
Notă: Receptorul cu ultrasunete trebuie să detecteze semnalul de la transmițătorul cu ultrasunete în timp ce undele de transmisie lovesc obiectul. Combinarea acestor doi senzori va permite robotului să detecteze obiectul aflat în calea sa. Senzorul cu ultrasunete este atașat în fața robotului și acel senzor îl va ajuta și pe acesta să navigheze prin holul oricărei clădiri.
Aplicații ale senzorului cu ultrasunete:
- Schimbare automată a semnalelor de trafic
- Sistem de alarmă pentru intruși
- Comutatoarele de acces la instrumentele de numărare parcometre
- Sonar din spate al automobilelor
Caracteristici ale senzorului cu ultrasunete:
- Compact și ușor
- Sensibilitate ridicată și presiune ridicată
- Fiabilitate ridicată
- Consum de energie de 20mA
- Comunicare impuls / intrare
- Unghi îngust de acceptare
- Oferă estimări exacte de separare fără contact între 2 cm și 3 m
- LED-ul punctului de explozie arată estimări în avans
- Antetul cu 3 pini simplifică conectarea utilizând un link de dezvoltare servo
Aplicații ale vehiculului robotic de evitare a obstacolelor:
- Mai ales aplicații militare
- Poate fi folosit pentru războaie de oraș
Acum am avut clar o idee despre conceptul de vehicul robotizat folosind un senzor cu ultrasunete de detectare a obstacolelor, dacă mai există întrebări suplimentare cu privire la acest subiect sau conceptul de proiecte electrice și electronice, lăsând comentariile de mai jos.
Credit foto:
- Diagrama generală a senzorului cu ultrasunete de Letsmakerobots
- Principiul de lucru al senzorului cu ultrasunete de Microsonic




{kind=link}