
CAN sau Controller Area Network este o tehnologie de rețea serial cu două semi-duplexuri de mare viteză. Este practic utilizat în comunicarea între diferite dispozitive într-o regiune cu rază mică, cum ar fi într-un automobil. Un protocol CAN este un protocol CSMA-CD / ASM sau un arbitru de detectare a coliziunilor cu acces multiplu pe protocolul de prioritate a mesajului. CSMA se asigură că fiecare nod trebuie să aștepte o anumită perioadă înainte de a trimite orice mesaj. Detectarea coliziunilor asigură evitarea coliziunii prin selectarea mesajelor pe baza priorității lor prescrise.
Oferă o rată de semnalizare de la 125 kbps la 1 Mbps. Oferă 2048 de identificatori de mesaje diferite.
Este standard ISO-11898 și folosește modelul de interconectare a sistemelor deschise pe 7 straturi.
Istorie:
A fost dezvoltat de Robert Bosch în 1982 și lansat oficial de Societatea de ingineri auto din Detroit în 1986. Prima mașină care integrează autobuzul CAN a fost fabricată de Mercedes Benz în 1992.
Arhitectura ISO 11898:

Sursa imaginii - theremino
Arhitectura stratificată constă din trei straturi
- Strat de aplicație : Interacționează cu sistemul de operare sau cu aplicația dispozitivului CAN.
- Strat de legătură de date : Conectează datele reale la protocol în ceea ce privește trimiterea, primirea și validarea datelor.
- Strat fizic : Reprezintă hardware-ul propriu-zis.
Cadrul CAN standard constă din următorii biți:
 Cadrul CAN standard constă din următorii biți:
Cadrul CAN standard constă din următorii biți:
- SOF- Începutul pr ame. Mesajul începe din acest punct.
- Identifica : Decide prioritatea mesajului. Mai mică este valoarea binară, cu atât este mai mare prioritatea. Este de 11 biți.
- RTR - Cerere de transmisie la distanță. Este dominant atunci când sunt necesare informații de la un alt nod. Fiecare nod primește cererea, dar numai acel nod al cărui identificator se potrivește cu cel al mesajului este nodul necesar. Fiecare nod primește și răspunsul.z
- AICI - Extensie de identificare unică. Dacă este dominant, înseamnă că se transmite un identificator CAN standard fără extensie.
- R0 - bit rezervat.
- DLC - Codul lungimii datelor. Acesta definește lungimea datelor trimise. Este de 4 biți
- Date - Se pot transmite până la 64 de biți de date.
- CRC - Verificare redundanță ciclică. Acesta conține suma de control (numărul de biți transmis) a datelor aplicației precedente pentru detectarea erorilor.
- VAI - Recunoaște. Este pentru 2 biți. Este dominant dacă se primește un mesaj corect.
- EOF - capătul cadrului. Acesta marchează sfârșitul cadrului de cutii și dezactivează umplutura de biți.
- IFS - Inter Frame Space. Conține timpul necesar controlerului pentru a muta un cadru recepționat corect în poziția corectă.
5 tipuri diferite de mesaje sunt:
- Cadru de date : Se compune dintr-un câmp arbitrar, câmp de date, câmp CRC și câmpurile de confirmare.
- Cadru la distanță : Solicită transmiterea datelor de la un alt nod. Aici bitul RTR este recesiv.
- Cadru de eroare : Se transmite atunci când este detectată o eroare.
- Cadru de suprasarcină : Este folosit pentru a oferi o întârziere între mesaje. Se transmite atunci când nodurile devin prea ocupate.
- Cadru valid : Un mesaj este valid dacă câmpul EOF este recesiv. Altfel mesajul este transmis din nou.
Stratul fizic CAN:
Autobuz CAN

Sursa imaginii - digital.ni
Se compune dintr-o legătură serială cu două fire - CAN_H și CAN_L, iar nivelurile de tensiune ale acestora, una față de cealaltă, determină dacă este transmis un 1 sau 0. Aceasta este semnalizarea diferențială. Curentul care curge în fiecare linie de semnal este egal, dar opus în direcție, rezultând un efect de anulare a câmpului, care este cheia emisiilor reduse de zgomot. Acest lucru asigură o semnalizare diferențială echilibrată, care reduce cuplarea zgomotului și permite o rată ridicată de transmisie prin fire. De obicei, firele sunt cabluri cu perechi răsucite, cu o lungime a magistralei de 40 m și maximum 30 de noduri. Este un cablu ecranat sau neecranat cu o impedanță caracteristică de 120 Ohmi.
TRANSCEPTORUL POATE:

CAN pentru vehicule de Hugo Provencher. Cele două fire CANH și CANL sunt la 2,5V determinate în mod normal de cei doi tranzistori și de sursa de tensiune de 2,5V. Practic, diferența dintre cele două fire trebuie să fie întotdeauna 0. Controlul șoferului determină tensiunea aplicată firelor CANH și CANL. Când ambii tranzistori conduc, scade tensiunea peste 1Sftranzistorul și dioda sunt de 1,5V, ceea ce face ca firul CANH să treacă până la 3,5V. Căderea de tensiune pe 2ndtranzistorul și dioda sunt de 1V, ceea ce face ca firul CANL să treacă în jos la 1,5V. Diodele sunt utilizate pentru protecția de înaltă tensiune. Receptorul este un circuit discriminator care dă o ieșire de 1 atunci când cele două intrări CANH și CANL sunt aceleași și o ieșire de 0 dacă cele două intrări sunt diferite. Blocul dominant TXD este utilizat pentru protecția împotriva defecțiunilor la sol, iar blocul de oprire termică dezactivează controlul șoferului dacă diodele și tranzistoarele sunt supraîncălzite.
Avantajele CAN:
- Reduce cablajul, deoarece este un control distribuit și acest lucru asigură îmbunătățirea performanței sistemului.
- Mulți producători de cipuri CAN au furnizat stratul de legătură de date și stratul fizic interfațat cu cipul și tot ce trebuie să facă dezvoltatorul de software este doar să dezvolte codificarea aplicației.
- Oferă capacitatea de a lucra în diferite medii electrice și asigură o transmisie fără zgomot.
- Congestia de trafic este eliminată pe măsură ce mesajele sunt transmise pe baza priorității lor și permite întregii rețele să îndeplinească constrângerile de sincronizare.
- Acesta prevede transmiterea fără erori, deoarece fiecare nod poate verifica erorile în timpul transmiterii mesajului și poate trimite cadrul de eroare.
Exemplu de lucru CAN:
Controlerul rețea are aplicații vaste atât în industria, cât și în vehicule. Una dintre aplicațiile majore este implicată în comunicarea între diferitele dispozitive dintr-un vehicul. Un altul poate fi printre diferitele microcontrolere, să presupunem că pentru detectarea unei parole, utilizate pentru a îndeplini orice cerințe cum ar fi deschiderea unei uși încuiate folosind o parolă sau pornirea unui bec etc.

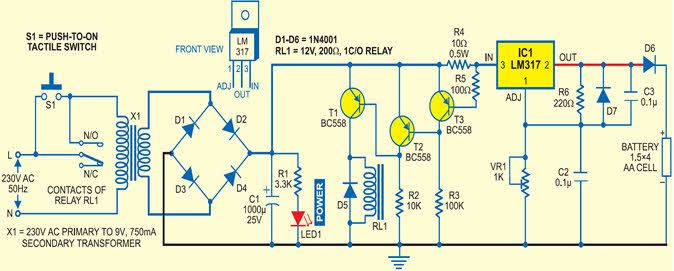
Circuitul rețelei zonei controlerului
Aplicația de bază constă din 3 microcontrolere care comunică între ele folosind două fire ca într-o rețea CAN. 1Sfmicrocontrolerul este interfațat cu o tastatură, 2ndcu un LCD, iar al treilea cu un buzzer și un releu care acționează o lampă. Când este introdusă o parolă pe tastatură, 2ndmicrocontrolerul acționează ca un receptor și primește mesajul transmis bit cu bit de la 1Sftransmițător și afișează mesajul pe ecranul LCD. Când este transmis întregul mesaj, 2ndmicrocontrolerul face verificarea și dacă parola este greșită, trimite un semnal către 3rdmicrocontroler, care la rândul său trimite buzzer este pornit cu acest semnal. Când parola este corectă, 3rdmicrocontrolerul pornește releul care la rândul său aprinde lampa.







{kind=link}
{kind=link}