Circuitul VFD 3 faze prezentat ( proiectat de mine ) poate fi utilizat pentru controlul vitezei oricărui motor alternativ trifazat sau chiar a unui motor alternativ fără perii. Ideea a fost cerută de domnul Tom
Folosind VFD
Circuitul VFD trifazat propus poate fi aplicat universal pentru majoritatea motoarelor trifazate în curent alternativ, unde eficiența reglării nu este prea critică.
Poate fi folosit în mod special pentru control turația motorului de inducție a cuștii veveriței cu un mod buclă deschisă și, eventual, și în modul buclă închisă, care va fi discutat în partea ulterioară a articolului.
Module necesare pentru invertorul cu 3 faze
Pentru proiectarea circuitului VFD trifazat propus sau a circuitului de acționare cu frecvență variabilă, sunt esențial necesare următoarele etape fundamentale ale circuitului:
- Circuitul controlerului de tensiune PWM
- Circuit driver trifazic partea înaltă / laterală joasă a podului H.
- Circuit generator 3 faze
- Circuitul convertorului de tensiune la frecvență pentru generarea parametrului V / Hz.
Să învățăm detaliile de funcționare ale etapelor de mai sus cu ajutorul următoarei explicații:
Un circuit simplu al controlerului de tensiune PWM poate fi observat în diagrama dată mai jos:

Controlerul PWM
Am încorporat și explicat deja funcționarea etapei generatorului PWM de mai sus, care este concepută practic pentru a genera o ieșire PWM variabilă pe pinul 3 al IC2 ca răspuns la potențialul aplicat la pinul 5 al aceluiași IC.
Presetarea 1K prezentată în diagramă este butonul de control RMS, care poate fi ajustat în mod corespunzător pentru a obține cantitatea proporțională dorită de tensiune de ieșire sub formă de PWM la pinul 3 al IC2 pentru procesare ulterioară. Aceasta este setată pentru a produce o ieșire corespunzătoare care poate fi echivalentă cu rețeaua electrică de 220V sau 120V AC RMS.
Circuitul driverului H-Bridge
Următoarea diagramă de mai jos prezintă un circuit de conducere trifazat cu o singură cip H-bridge trifazat folosind IC IRS2330.
Designul arată simplu, deoarece majoritatea complexităților sunt gestionate de circuitele sofisticate încorporate în jetoane.
Un semnal trifazic bine calculat este aplicat la intrările HIN1 / 2/3 și LIN1 / 2/3 ale IC printr-o etapă generator de semnal trifazat.
Ieșirile fișierului IC IRS2330 poate fi văzut integrat cu 6 mosfete sau rețea de punte IGBT, ale căror drenuri sunt configurate corespunzător cu motorul care trebuie controlat.
Porțile laterale joase MOSFET / IGBT sunt integrate cu pinul IC2 # 3 al etapei circuitului generatorului PWM discutat mai sus pentru inițierea injecției PWM în etapa MOSFET pod. Această reglementare ajută în cele din urmă motorul să câștige viteza dorită conform setărilor (prin presetarea de 1 k din prima diagramă).

În următoarea diagramă, vizualizăm circuitul generator de semnal trifazic necesar.

Configurarea circuitului generatorului trifazat
Generatorul de 3 faze este construit în jurul a câteva cipuri CMOS CD4035 și CD4009, care generează semnale trifazate dimensionate cu precizie pe pinouturile afișate.
Frecvența semnalelor trifazate depinde de ceasurile de intrare alimentate, care ar trebui să fie de 6 ori semnalul trifazic prevăzut. Adică, dacă frecvența trifazică necesară este de 50 Hz, ceasul de intrare ar trebui să fie de 50 x 6 = 300 Hz.
De asemenea, implică faptul că ceasurile de mai sus ar putea fi variate pentru a varia frecvența efectivă a IC-ului driverului, care la rândul său ar fi responsabil de variația frecvenței operaționale a motorului.
Cu toate acestea, deoarece modificarea frecvenței de mai sus trebuie să fie automată ca răspuns la tensiunea variabilă, devine esențial un convertor de tensiune la frecvență. Următoarea etapă discută despre un circuit simplu convertor de tensiune la frecvență pentru implementarea necesară.
Cum se creează un raport V / F constant
De obicei la motoarele cu inducție, pentru a menține o eficiență optimă a turației și a torsiunii motorului, trebuie controlată viteza de alunecare sau viteza rotorului, care la rândul său devine posibilă prin menținerea unui raport V / Hz constant. Deoarece fluxul magnetic al statorului este întotdeauna constant, indiferent de frecvența de alimentare de intrare, viteza rotorului devine ușor controlabilă de menținând raportul V / Hz constant .
În modul buclă deschisă, acest lucru se poate face aproximativ prin menținerea rapoartelor predeterminate V / Hz și implementarea acestuia manual. De exemplu, în prima diagramă, acest lucru se poate face prin ajustarea corespunzătoare a presetărilor R1 și 1K. R1 determină frecvența, iar 1K reglează RMS-ul ieșirii, prin urmare, prin ajustarea adecvată a celor doi parametri putem aplica manual cantitatea necesară V / Hz.
Cu toate acestea, pentru a obține un control relativ precis al cuplului și vitezei motorului de inducție, trebuie să implementăm o strategie cu buclă închisă, în care datele despre viteza de alunecare trebuie să fie introduse în circuitul de procesare pentru o ajustare automată a raportului V / Hz, astfel încât aceasta valoarea rămâne întotdeauna aproape constantă.
Implementarea feedback-ului de buclă închisă
Prima diagramă de pe această pagină poate fi modificată corespunzător pentru proiectarea reglării automate V / Hz în buclă închisă, după cum se arată mai jos:

În figura de mai sus, potențialul la pinul 5 al IC2 determină lățimea SPWM care este generată la pinul 3 al aceluiași IC. SPWM sunt generate prin compararea eșantionului de 12V de la rețeaua de la pinul 5 cu unda triunghiulară la pinul 7 al IC2, iar acesta este alimentat la mosfetele laterale joase pentru controlul motorului.
Inițial acest SPWM este setat la un anumit nivel ajustat (folosind 1K perset) care declanșează porțile IGBT laterale joase ale podului trifazat pentru inițierea mișcării rotorului la nivelul de turație nominală specificat.
De îndată ce rotorul rotorului începe să se rotească, tahometrul atașat cu mecanismul rotorului determină să se dezvolte o cantitate suplimentară proporțională de tensiune la pinul 5 al IC2, ceea ce face ca SPWM-urile să se lărgească, provocând mai multă tensiune bobinelor statorice ale motorului. Acest lucru determină o creștere suplimentară a vitezei rotorului, provocând mai multă tensiune la pinul 5 al IC2, iar acest lucru continuă până când tensiunea echivalentă SPWM nu mai poate crește și sincronizarea rotorului statorului atinge o stare de echilibru.
Procedura de mai sus continuă să se auto-regleze pe parcursul perioadelor operaționale ale motorului.
Cum se realizează și se integrează tahometrul
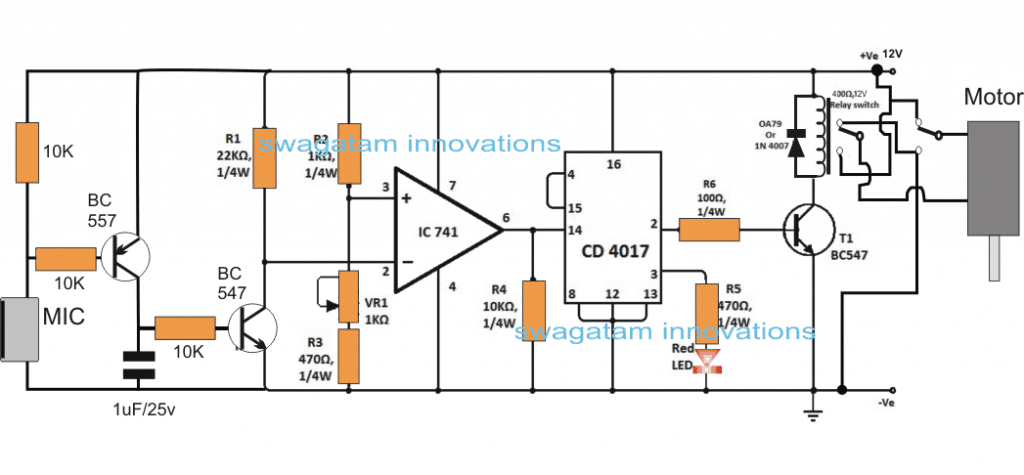
O schemă simplă a tahometrului poate fi văzută în următoarea diagramă, aceasta ar putea fi integrată cu mecanismul rotorului astfel încât frecvența de rotație să poată alimenta baza BC547.

Aici datele despre viteza rotorului sunt colectate de la un senzor de efect de hală sau de la o rețea IR LED / senzor și sunt alimentate la baza T1.
T1 oscilează la această frecvență și activează circuitul tahometric realizat prin configurarea adecvată a unui circuit monostabil IC 555.
Ieșirea din tahometrul de mai sus variază proporțional ca răspuns la frecvența de intrare la baza T1.
Pe măsură ce frecvența crește, tensiunea la extrema dreaptă crește și ieșirea D3 și invers și ajută la menținerea raportului V / Hz la un nivel relativ constant.
Cum se controlează viteza
Viteza motorului utilizând V / F constantă poate fi atinsă prin modificarea frecvenței de intrare la intrarea de ceas a IC 4035. Acest lucru poate fi realizat prin alimentarea unei frecvențe variabile de la un circuit IC 555 astabil sau de la orice circuit astabil standard la intrarea de ceas a IC 4035.
Schimbarea frecvenței modifică în mod eficient frecvența de funcționare a motorului, care în mod corespunzător scade viteza de alunecare.
Acest lucru este detectat de tahometru, iar tahometrul reduce proporțional potențialul la pinul 5 al IC2, care la rândul său reduce proporțional conținutul de SPWM pe motor și, în consecință, tensiunea pentru motor este redusă, asigurând variația turației motorului cu raportul V / F necesar.
Un convertor de casă V în F.

În circuitul convertorului de tensiune la frecvență de mai sus este utilizat un IC 4060 și rezistența sa dependentă de frecvență este influențată printr-un ansamblu LED / LDR pentru conversiile intenționate.
Ansamblul LED / LDR este sigilat într-o cutie rezistentă la lumină, iar LDR este poziționat pe un rezistor de 1M dependent de frecvență al CI.
Deoarece răspunsul LDR / LDR este destul de liniar, iluminarea variabilă a LED-ului de pe LDR generează o frecvență proporțională (crescătoare sau descrescătoare) pe pinul 3 al IC.
FSD sau gama V / Hz a scenei ar putea fi setată prin configurarea corespunzătoare a rezistorului 1M sau chiar a valorii C1.
LED-ul este tensiunea derivată și iluminată prin PWM-uri din prima etapă a circuitului PWM. Aceasta implică faptul că, pe măsură ce PWM-urile variază, iluminarea LED-urilor va varia, de asemenea, ceea ce la rândul său ar da naștere la o frecvență proporțională crescătoare sau descrescătoare la pinul 3 al IC 4060 din diagrama de mai sus.
Integrarea convertorului cu VFD
Această frecvență variabilă de la IC 4060 trebuie pur și simplu să fie integrată cu intrarea de ceas IC CD4035 a generatorului de 3 faze.
Etapele de mai sus formează principalele ingrediente pentru realizarea unui circuit VFD în 3 faze.
Acum, ar fi important să discutați cu privire la BUS-ul DC necesar pentru furnizarea controlerelor de motor IGBT și procedurile de configurare pentru întregul design.
BUS-ul DC aplicat pe șinele H-bridge IGBT poate fi obținut prin rectificarea intrării de rețea 3 faze disponibile utilizând următoarea configurație a circuitului. Șinele IGBT DC BUS sunt conectate prin punctele indicate ca „încărcare”

Pentru o sursă monofazată, rectificarea poate fi implementată utilizând configurația standard a rețelei podului cu 4 diode.
Cum se configurează circuitul VFD trifazat propus
Se poate face conform următoarelor instrucțiuni:
După aplicarea tensiunii magistralei DC pe IGBT (fără motorul conectat) reglați presetarea PWM 1k până când tensiunea pe șine devine egală cu specificațiile de tensiune ale motorului.
Apoi reglați presetarea IC 4060 1M pentru a regla oricare dintre intrările IC IRS2330 la nivelul de frecvență corect necesar conform specificațiilor motorului date.
După finalizarea procedurilor de mai sus, motorul specificat poate fi conectat și furnizat cu diferite niveluri de tensiune, parametru V / Hz și confirmat pentru operațiuni automate V / Hz peste motorul conectat.
Precedent: Cum să construiești un circuit luminos de creștere Următorul: Circuit de dedurizare a apei explorat

![Circuit convertizor de 24 V la 12 V CC [folosind regulator de comutare]](https://electronics.jf-parede.pt/img/3-phase-power/F1/24-v-to-12-v-dc-converter-circuit-using-switching-regulator-1.jpg)