În acest articol vom încerca să înțelegem modul în care algoritmul de control scalar este implementat pentru controlul vitezei motorului de inducție cu calcule relativ simple și totuși obținem un control al vitezei variabil liniar rezonabil al motorului.

Rapoartele din numeroase analize de piață de top arată că motoare cu inducție sunt cele mai populare atunci când vine vorba de manipularea aplicațiilor și lucrărilor legate de motoarele industriale grele. Principalele motive care stau la baza popularității motoarelor cu inducție se datorează în principal gradului său ridicat de robustețe, fiabilității mai mari în ceea ce privește problemele de uzură și eficienței funcționale relativ ridicate.
Acestea fiind spuse, motoarele cu inducție au un dezavantaj tipic, deoarece acestea nu sunt ușor de controlat cu metode convenționale obișnuite. Controlul motoarelor cu inducție este relativ exigent datorită configurației sale matematice destul de complexe, care include în primul rând:
- Răspuns neliniar la saturația nucleului
- Instabilitate sub forma oscilațiilor datorită temperaturii variabile a înfășurării.
Datorită acestor aspecte critice, punerea în aplicare a controlului motorului de inducție necesită în mod optim un algoritm bine calculat, cu fiabilitate ridicată, de exemplu, folosind o metodă de „control vectorial” și folosind suplimentar un sistem de procesare bazat pe microcontroler.
Înțelegerea implementării controlului scalar
Cu toate acestea, există o altă metodă care poate fi aplicată pentru implementarea controlului motorului de inducție utilizând o configurație mult mai ușoară, este controlul scalar care încorporează tehnici de acționare non-vectoriale.
De fapt, este posibil să activați un motor cu inducție de curent alternativ într-o stare stabilă, acționând-o cu un sistem de reacție direct de tensiune și sisteme controlate de curent.
În această metodă scalară, variabila scalară poate fi modificată odată ce valoarea ei corectă este atinsă fie prin experimentarea practică, fie prin formule și calcule adecvate.
Apoi, această măsurare poate fi utilizată pentru implementarea controlului motorului printr-un circuit în buclă deschisă sau printr-o topologie a buclei de feedback închisă.
Chiar dacă metoda scalară de control promite rezultate stabile în mod rezonabil la motor, este posibil ca răspunsul său tranzitoriu să nu fie la înălțime.
Cum funcționează motoarele cu inducție
Cuvântul „inducție” în motoarele cu inducție se referă la modul unic de funcționare a acestuia, în care magnetizarea rotorului prin înfășurarea statorului devine un aspect crucial al operației.
Când se aplică curent alternativ peste înfășurarea statorului, câmpul magnetic oscilant din înfășurarea statorului interacționează cu armatura rotorului creând un nou câmp magnetic pe rotor, care la rândul său reacționează cu câmpul magnetic al statorului inducând o cantitate mare de cuplu de rotație pe rotor . Acest cuplu de rotație redă puterea mecanică efectivă necesară pentru mașină.
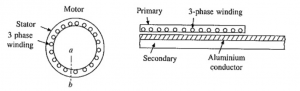
Ce este motorul cu inducție în cușcă veveriță trifazată
Este cea mai populară variantă a motoarelor cu inducție și este utilizată pe scară largă în aplicații industriale. Într-un motor cu inducție în cușcă de veveriță, rotorul poartă o serie de conductoare ca niște bare care înconjoară axa rotorului, prezentând o structură unică asemănătoare cuștilor și de aici denumirea de „cușcă de veveriță”.
Aceste bare care sunt înclinate în formă și care se desfășoară în jurul axei rotorului sunt atașate cu inele metalice groase și rezistente la capetele barelor. Aceste inele metalice nu numai că ajută la fixarea puternică a barelor în poziție, dar pun în aplicare și un scurtcircuit electric esențial peste bare.
Atunci când înfășurarea statorului este aplicată cu un curent alternativ sinusoidal trifazat de secvențiere, câmpul magnetic rezultat începe, de asemenea, să se miște cu aceeași viteză ca frecvența sinusoidală a statorului cu 3 faze (ωs).
Deoarece ansamblul rotorului cușcă de veveriță este ținut în înfășurarea statorului, câmpul magnetic trifazat alternativ de mai sus de la înfășurarea statorului reacționează cu ansamblul rotorului inducând un câmp magnetic echivalent pe conductorii de bare ai ansamblului cușcă.
Acest lucru forțează un câmp magnetic secundar să se acumuleze în jurul barelor rotorului și, în consecință, acest nou câmp magnetic este forțat să interacționeze cu câmpul statoric, impunând un cuplu de rotație pe rotor care încearcă să urmeze direcția câmpului magnetic al statorului.

În acest proces, viteza rotorului încearcă să atingă viteza de frecvență a statorului și, pe măsură ce se apropie de viteza câmpului magnetic sincron al statorului, diferența relativă de viteză e între viteza de frecvență a statorului și viteza de rotație a rotorului începe să scadă, ceea ce determină o scădere a vitezei magnetice. interacțiunea câmpului magnetic al rotorului peste câmpul magnetic al statorului, scăzând în cele din urmă cuplul pe rotor și puterea de ieșire echivalentă a rotorului.
Acest lucru duce la o putere minimă pe rotor și la această viteză se spune că rotorul a dobândit o stare de echilibru, în care sarcina pe rotor este echivalentă și se potrivește cuplului pe rotor.
Funcționarea unui motor cu inducție ca răspuns la o sarcină poate fi rezumată așa cum se explică mai jos:
Deoarece devine obligatoriu să se mențină o diferență fină între viteza rotorului (arborelui) și viteza interioară a frecvenței statorului, viteza rotorului care gestionează efectiv sarcina se rotește cu o viteză ușor redusă decât viteza frecvenței statorului. Dimpotrivă, dacă presupunem că statorul este aplicat cu 50Hz alimentare cu 3 faze, atunci viteza unghiulară a acestei frecvențe de 50Hz pe înfășurarea statorului va fi întotdeauna ușor mai mare decât răspunsul la viteza de rotație a rotorului, aceasta este menținută în mod inerent pentru a asigura o optimă putere pe rotor.
Ce este alunecarea în motorul cu inducție
Diferența relativă între viteza unghiulară a frecvenței statorului și viteza de rotație sensibilă a rotorului este denumită „alunecare”. Alunecarea trebuie să fie prezentă chiar și în situațiile în care motorul este acționat cu o strategie orientată pe teren.
Deoarece arborele rotorului în motoarele cu inducție nu depinde de nici o excitație externă pentru rotația sa, acesta poate funcționa fără inele de alunecare convenționale sau perii, asigurând practic uzură zero, eficiență ridicată și totuși ieftin cu întreținerea sa.
Factorul de cuplu al acestor motoare este determinat de unghiul stabilit între fluxurile magnetice ale statorului și ale rotorului.
Privind diagrama de mai jos, putem vedea că viteza rotorului este atribuită ca Ω, iar frecvențele dintre stator și rotor sunt determinate de parametrul „s” sau de alunecare, prezentat cu formula:
s = ( ω s - ω r ) / ω s
În expresia de mai sus, s este „alunecarea” care prezintă diferența dintre viteza sincronă a statorului și viteza reală a motorului dezvoltată pe arborele rotorului.

Înțelegerea teoriei controlului vitezei scalare
În conceptele de control al motorului cu inducție unde Tehnic V / Hz este utilizat, controlul vitezei este implementat prin reglarea tensiunii statorului în funcție de frecvență, astfel încât fluxul de goluri de aer să nu poată devia niciodată dincolo de intervalul așteptat al stării de echilibru, cu alte cuvinte, este menținut în această stare de echilibru estimată valoare, și, prin urmare, este, de asemenea, numit control scalar metoda, deoarece tehnica depinde în mare măsură de dinamica stării de echilibru pentru controlul vitezei motorului.
Putem înțelege funcționarea acestui concept făcând referire la următoarea figură, care arată schema simplificată a unei tehnici de control scalar. În setare, se presupune că rezistența statorului (Rs) este zero, în timp ce inductanța de scurgere a statorului (LIs) este impresionată de scăderea rotorului și inductanța de magnetizare (LIr). (LIr) care descrie de fapt magnitudinea fluxului de spațiu de aer se poate vedea că a fost împins înainte de inductanța totală de scurgere (Ll = Lls + Llr).

Datorită acestui fapt, fluxul de spațiu de aer creat de curentul de magnetizare obține o valoare aproximativă apropiată de raportul de frecvență al statorului. Astfel, expresia fazorului pentru o evaluare a stării de echilibru poate fi scrisă după cum urmează:

Pentru motoarele cu inducție care pot funcționa în regiunile lor magnetice liniare, Lm nu se va schimba și va rămâne constant, în astfel de cazuri ecuația de mai sus poate fi exprimată ca:

Unde V și Λ sunt valorile tensiunii statorului și respectiv fluxul statoric, în timp ce Ṽ reprezintă parametrul fazor în proiectare.
Ultima expresie de mai sus explică clar că, atâta timp cât raportul V / f este menținut constant, indiferent de orice modificare a frecvenței de intrare (f), atunci fluxul rămâne constant, ceea ce permite toquei să funcționeze fără a depinde de frecvența tensiunii de alimentare. . Aceasta implică dacă ΛM este menținut la un nivel constant, raportul Vs / ƒ ar fi, de asemenea, redat la o viteză relevantă constantă. Prin urmare, ori de câte ori se mărește viteza motorului, tensiunea peste înfășurarea statorului va trebui, de asemenea, să fie mărită proporțional, astfel încât să se poată menține un Vs / f constant.
Totuși aici alunecarea este funcția sarcinii atașate motorului, viteza sincronă a frecvenței nu descrie viteza reală a motorului.
În absența unui cuplu de sarcină pe rotor, alunecarea rezultată poate fi neglijabil de mică, permițând motorului să atingă aproape de turații sincrone.
De aceea, o configurație de bază Vs / f sau V / Hz, de obicei, nu poate avea capacitatea de a implementa un control precis al vitezei unui motor cu inducție atunci când motorul este atașat cu un cuplu de sarcină. Cu toate acestea, o compensare a alunecării poate fi introdusă destul de ușor în sistem, împreună cu măsurarea vitezei.
Reprezentarea grafică indicată mai jos prezintă în mod clar un senzor de viteză într-un sistem V / Hz cu buclă închisă.

În implementările practice, raportul dintre tensiunea și frecvența statorului poate fi dependent de evaluarea acestor parametri în sine.
Analiza controlului vitezei V / Hz
O analiză standard V / Hz poate fi asistată în figura următoare.

În principiu, veți găsi 3 intervale de selecție a vitezei într-un profil V / Hz, care poate fi înțeles din următoarele puncte:
- Referitor la figura 4 când frecvența de întrerupere este la regiunea 0-fc, o intrare de tensiune devine esențială, ceea ce dezvoltă o cădere potențială peste înfășurarea statorului, iar această cădere de tensiune nu poate fi ignorată și necesită compensare prin creșterea tensiunii de alimentare Vs. Aceasta indică faptul că în această regiune profilul raportului V / Hz nu este o funcție liniară. Putem evalua analitic frecvența de întrerupere fc pentru tensiuni statorice adecvate cu ajutorul circuitului echivalent în stare staționară având Rs ≠ 0.
- În regiunea fc-r (nominală) Hz, este capabil să execute o relație constantă Vs / Hz, în acest caz panta relației semnifică cantitatea fluxului de goluri de aer .
- În regiunea de dincolo de f (nominală), care funcționează la frecvențe mai mari, devine imposibil să se realizeze raportul Vs / f la o rată constantă, deoarece în această poziție tensiunea statorului tinde să fie limitată la valoarea f (nominală). Acest lucru se întâmplă pentru a vă asigura că înfășurarea statorului nu este supusă unei defecțiuni de izolație. Datorită acestei situații, fluxul de decalaj rezultat tinde să fie compromis și redus, ducând la un cuplu al rotorului în scădere corespunzător. Această fază operațională în motoarele cu inducție este denumită „Regiune de slăbire a câmpului” . Pentru a preveni acest tip de situație, de obicei o regulă constantă V / Hz nu este respectată în aceste intervale de frecvență.
Datorită prezenței unui flux magnetic constant al statorului, indiferent de modificarea frecvenței înfășurării staorului, toca de pe rotor trebuie să se bazeze acum doar pe viteza de alunecare, acest efect poate fi văzut în figura 5 de mai sus
Cu o reglare adecvată a vitezei de alunecare, viteza unui motor cu inducție ar putea fi controlată eficient împreună cu cuplul pe sarcina rotorului prin utilizarea unui principiu constant V / Hz.
Prin urmare, indiferent dacă este un mod de control al vitezei deschis sau închis, ambele ar putea fi implementate folosind regula constantă V / Hz.
Un mod de control în buclă deschisă ar putea fi utilizat în aplicații în care precizia controlului vitezei nu poate fi un factor important, cum ar fi în unitățile HVAC sau în aparatele de tip ventilator și suflantă. În astfel de cazuri, frecvența la sarcină se găsește prin referirea la nivelul de viteză necesar al motorului, iar viteza rotorului este de așteptat să urmeze aproximativ viteza sincronă instantanee. Orice formă de discrepanță a vitezei care rezultă din alunecarea motorului este în general ignorată și acceptată în astfel de aplicații.
Referință: http://www.ti.com/lit/an/sprabq8/sprabq8.pdf
Precedent: Înțelegerea rezistențelor pull-up și pull-down cu diagrame și formule Următorul: Foaie de date și funcționare a bateriei 18650 2600mAh