În această postare discutăm despre realizarea unui circuit simplu de control al vitezei motorului cu inducție trifazată, care poate fi aplicat și pentru un motor cu inducție monofazat sau literal pentru orice tip de motor AC.
Cand vine vorba de controlul vitezei motoarelor cu inducție , în mod normal sunt utilizate convertizoare cu matrice, care implică multe etape complexe, cum ar fi filtre LC, tablouri bidirecționale de comutatoare (folosind IGBT) etc.
Toate acestea sunt utilizate pentru a obține în cele din urmă un semnal de curent alternativ al cărui ciclu de funcționare ar putea fi ajustat folosind un circuit complex de microcontroler, asigurând în cele din urmă controlul necesar al turației motorului.
Cu toate acestea, putem experimenta și încerca să realizăm un control al vitezei motorului cu inducție trifazat printr-un concept mult mai simplu, folosind IC-urile avansate ale cuplatorului opto-cuplator al detectorului de trecere zero, un triac de putere și un circuit PWM.
Utilizarea cuplajului opto-detector Zero Crossing
Datorită seriei de optocuploare MOC, care a făcut circuitele de control triac extrem de sigure și ușor de configurat și permite o integrare PWM fără probleme pentru comenzile intenționate.
Într-una din postările mele anterioare am discutat despre un simplu Circuitul controlerului motorului PWM soft start care a implementat IC MOC3063 pentru asigurarea unui start eficient eficient pe motorul conectat.
Și aici folosim o metodă identică pentru punerea în aplicare a circuitului regulatorului de turație a motorului cu inducție trifazat propus, următoarea imagine arată cum se poate face acest lucru:
În figură putem vedea trei etape de cuplare opto MOC identice configurate în modul lor regulator triac standard și partea de intrare integrată cu un circuit simplu IC 555 PWM .
Cele 3 circuite MOC sunt configurate pentru manipularea intrării de curent alternativ trifazate și livrarea acestora la motorul cu inducție atașat.
Intrarea PWM din partea de control LED izolată a opto determină raportul de tăiere a intrării trifazate AC care este procesată de MOC ICS.
Utilizarea controlerului IC 555 PWM (comutare de tensiune zero)
Aceasta implică, prin ajustarea Oală PWM asociată cu 555 IC se poate controla în mod eficient viteza motorului cu inducție.
Ieșirea la pinul său 3 vine cu un ciclu de funcționare variabil care, la rândul său, comută triacurile de ieșire în consecință, rezultând fie în creșterea valorii AC RMS, fie în scăderea aceluiași.
Creșterea RMS prin PWM-uri mai largi permite dobândirea unei viteze mai mari pe motor, în timp ce scăderea RMS AC prin PWM-uri mai înguste produce un efect opus, adică determină motorul să încetinească proporțional.
Funcțiile de mai sus sunt implementate cu multă precizie și siguranță, deoarece IC-urile sunt atribuite cu multe caracteristici sofisticate interne, destinate în mod special triacuri de conducere și sarcini inductive grele cum ar fi motoare cu inducție, solenoizi, supape, contactoare, relee de stare solidă etc.
IC asigură, de asemenea, o funcționare perfect izolată pentru etapa DC, care permite utilizatorului să facă ajustările fără teama unui șoc electric.
Principiul poate fi, de asemenea, utilizat eficient pentru controlul turației motorului monofazat, prin utilizarea unui singur IC MOC în loc de 3.
Designul se bazează de fapt pe unitate triac proporțională cu timpul teorie. Circuitul PWM IC555 superior poate fi reglat pentru a produce un ciclu de funcționare de 50% la o frecvență mult mai mare, în timp ce circuitul PWM inferior poate fi utilizat pentru implementarea operației de control al vitezei motorului de inducție prin ajustările potului asociat.
Se recomandă ca acest IC 555 să aibă o frecvență relativ mai mică decât circuitul IC 555 superior. Acest lucru se poate face prin mărirea condensatorului pin # 6/2 la aproximativ 100nF.

NOTĂ: ADĂUGAREA INDUCTORILOR ADECVATI ÎN SERIA CU SIRURI DE FAZĂ POATE ÎMBUNĂTĂȚI DRASTIC PERFORMANȚA DE CONTROL A VITEZEI SISTEMULUI.
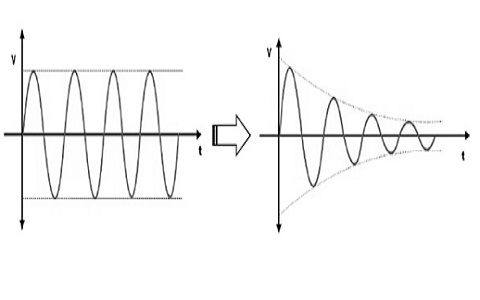
Forma de undă și controlul fazelor presupuse folosind conceptul de mai sus:

Metoda explicată mai sus pentru a controla un motor cu inducție trifazat este de fapt destul de brută, deoarece are fără control V / Hz .
Folosește pur și simplu pornirea / oprirea rețelei la viteze diferite pentru a produce o putere medie la motor și pentru a controla viteza modificând această medie AC la motor.
Imaginați-vă dacă porniți / opriți manual motorul de 40 de ori sau de 50 de ori pe minut. Acest lucru ar duce la încetinirea motorului la o anumită valoare medie relativă, totuși în mișcare continuă. Principiul de mai sus funcționează în același mod.
O abordare mai tehnică este proiectarea unui circuit care să asigure un control adecvat al raportului V / Hz și să îl regleze automat în funcție de viteza de alunecare sau de orice fluctuații de tensiune.
Pentru aceasta, folosim practic următoarele etape:
- Circuitul driverului H-Bridge sau Full Bridge IGBT
- Etapa generatorului trifazat pentru alimentarea circuitului de pod complet
- Procesor PWM V / Hz
Utilizarea unui circuit de control IGBT Full Bridge
Dacă procedurile de configurare ale proiectului bazat pe triac de mai sus vă par descurajante, poate fi încercat următorul control al vitezei motorului cu inducție bazat pe PWM complet:

Circuitul prezentat în figura de mai sus utilizează un singur driver full-bridge cu cip IC IRS2330 (cea mai recentă versiune este 6EDL04I06NT) care are toate caracteristicile încorporate pentru a satisface o siguranță și o funcționare perfectă a motorului trifazat.
IC-ul are nevoie doar de o intrare logică trifazată sincronizată pe pin-urile sale HIN / LIN pentru a genera ieșirea oscilantă trifazică necesară, care este utilizată în cele din urmă pentru operarea rețelei IGBT cu punte completă și a motorului trifazat conectat.
controlul vitezei injecție PWM este implementat prin intermediul a 3 trepte de driver NPN / PNP semi-punte separate, controlate cu o alimentare SPWM de la un generator IC 555 PWM așa cum se vede în proiectele noastre anterioare. Acest nivel PWM poate fi utilizat în cele din urmă pentru controlul vitezei motorului cu inducție.
Înainte de a învăța metoda reală de control al vitezei pentru motorul cu inducție, să înțelegem mai întâi cum este automat Control V / Hz poate fi realizat folosind câteva circuite IC 555, așa cum este discutat mai jos
Circuitul automat al procesorului PWM V / Hz (buclă închisă)
În secțiunile de mai sus am aflat proiectele care vor ajuta motorul de inducție să se deplaseze la viteza specificată de producător, dar nu se va regla în funcție de un raport constant V / Hz, cu excepția cazului în care următorul procesor PWM este integrat cu H -Furnizare de intrare PWM Bridge.

Circuitul de mai sus este unul simplu Generator PWM folosind câteva IC 555 . IC1 generează frecvența PWM care este convertită în unde triunghiulare la pinul 6 al IC2 cu ajutorul R4 / C3.
Aceste unde triunghiulare sunt comparate cu ondulația sinusoidală de la pinul 5 al IC2. Aceste eșantioane de probă sunt achiziționate prin rectificarea rețelei de curent alternativ trifazate într-o undă de 12 V c.a. și sunt alimentate la pinul 5 al IC2 pentru procesarea necesară.
Prin compararea celor două forme de undă, o dimensiune adecvată SPWM este generat la pinul 3 al IC2, care devine PWM de conducere pentru rețeaua H-bridge.
Cum funcționează circuitul V / Hz
Când alimentarea este pornită, condensatorul la pinul # 5 începe prin redarea unei tensiuni zero la pinul # 5, ceea ce determină cea mai mică valoare SPWM la Circuit H-bridge , care la rândul său permite motorului de inducție să pornească cu un pornire lentă treptată.
Pe măsură ce acest condensator se încarcă, potențialul la pinul 5 crește, ceea ce crește proporțional SPWM și permite motorului să câștige viteza treptat.
De asemenea, putem vedea un circuit de feedback pentru tahometru, care este, de asemenea, integrat cu pinul 5 al IC2.
Acest tahometru monitorizează viteza rotorului sau viteza de alunecare și generează tensiune suplimentară la pinul 5 al IC2.
Acum, pe măsură ce viteza motorului crește, viteza de alunecare încearcă să se sincronizeze cu frecvența statorului și în acest proces începe să câștige viteză.
Această creștere a alunecării de inducție crește proporțional tensiunea tahometrului, ceea ce determină, la rândul său, creșterea IC2 Ieșire SPWM iar aceasta, la rândul său, mărește și mai mult viteza motorului.
Reglarea de mai sus încearcă să mențină raportul V / Hz la un nivel destul de constant până când în cele din urmă SPWM de la IC2 nu mai poate crește.
În acest moment, viteza de alunecare și viteza statorului capătă o stare stabilă și aceasta se menține până când tensiunea de intrare sau viteza de alunecare (datorită sarcinii) nu sunt modificate. În cazul în care acestea sunt modificate, circuitul procesorului V / Hz intră din nou în acțiune și începe să regleze raportul pentru a menține răspunsul optim al turației motorului de inducție.
Tahometrul
Circuitul tahometric poate fi, de asemenea, construit ieftin folosind următorul circuit simplu și integrat cu etapele de circuit explicate mai sus:

Cum se implementează controlul vitezei
În paragrafele de mai sus am înțeles procesul de reglare automată care poate fi realizat prin integrarea unui feedback tahometru la un circuit de control SPWM de reglare automată.
Acum, să învățăm cum poate fi controlată viteza unui motor cu inducție prin variația frecvenței, ceea ce va forța în cele din urmă SPWM să scadă și să mențină raportul corect V / Hz.
Următoarea diagramă explică stadiul de control al vitezei:

Aici putem vedea un circuit generator trifazat folosind IC 4035 a cărui frecvență de schimbare de fază poate fi variată prin variația intrării ceasului la pinul său # 6.
Semnalele trifazate sunt aplicate pe porțile IC 4049 pentru producerea alimentărilor HIN, LIN necesare pentru rețeaua de drivere full-bridge.
Acest lucru implică faptul că, prin variația adecvată a frecvenței ceasului IC 4035, putem schimba în mod eficient frecvența trifazică de funcționare a motorului de inducție.
Acest lucru este implementat printr-un circuit simplu IC 555, care alimentează o frecvență reglabilă la pinul 6 al IC 4035 și permite reglarea frecvenței prin potul de 100K atașat. Condensatorul C trebuie calculat astfel încât gama de frecvență reglabilă să se încadreze în specificațiile corecte ale motorului de inducție conectat.
Când potul de frecvență este variat, se schimbă și frecvența efectivă a motorului cu inducție, care schimbă în mod corespunzător viteza motorului.
De exemplu, atunci când frecvența este redusă, determină reducerea vitezei motorului, ceea ce, la rândul său, determină ieșirea tahometrului să reducă proporțional tensiunea.
Această reducere proporțională a puterii de tahometru forțează SPWM să se îngusteze și astfel trage în jos proporțional tensiunea de ieșire la motor.
La rândul său, această acțiune asigură menținerea raportului V / Hz în timp ce se controlează viteza motorului de inducție prin controlul frecvenței.
Atenție: conceptul de mai sus este conceput doar pe baza ipotezelor teoretice, vă rugăm să continuați cu prudență.
Dacă aveți orice alte îndoieli cu privire la acest design al regulatorului de turație al motorului cu inducție trifazat, sunteți binevenit să postați același lucru prin comentariile dvs.
Precedent: Cum să proiectați un circuit de alimentare neîntreruptibilă (UPS) Următorul: Pornirea / oprirea a două încărcări alternative cu IC 555