În această parte a articolului aflăm despre o metodă inovatoare de transformare a mecanismului de presare a pedalei în vehiculele electrice într-un semnal electric care variază corespunzător, care poate fi utilizat în continuare pentru procesarea controlului vitezei vehiculului.
Conceptul explicat va funcționa ca un accelerator electronic, care va crește viteza vehiculului liniar atunci când pedala este apăsată treptat și invers, folosind tehnologia PWM
Ideea a fost cerută de dl Lokesh Maini
Specificatii tehnice
Sunt un tip mecanic, lucrez în prezent la un vehicul electric și vreau să controlez viteza motorului meu folosind pedala. Nu primesc un controler pentru motorul meu, vă rog să mă ajutați să-mi construiesc propriul meu
recunoscător
Specificațiile motorului sunt motor de curent continuu periat de 36 volt, 43 amp și 1,5 CP.
Proiectarea mecanică
O versiune electronică a acceleratorului de pedală va necesita în primul rând un mecanism pentru a converti mai întâi apăsarea mecanică a pedalei într-un semnal electric care variază corespunzător, astfel încât acest semnal să poată fi procesat printr-o etapă de procesor de semnal pentru conversia dorită într-un control practic al vitezei vehicul.
Multe concepte pot fi încercate, cum ar fi folosind un senzor de încărcare piezo, un senzor de încărcare capacitiv, de un senzor de rezonanță etc. În acest articol vom învăța o metodă mult mai simplă concepută de mine care încorporează un ansamblu LED / LDR pentru realizarea aceluiași lucru .

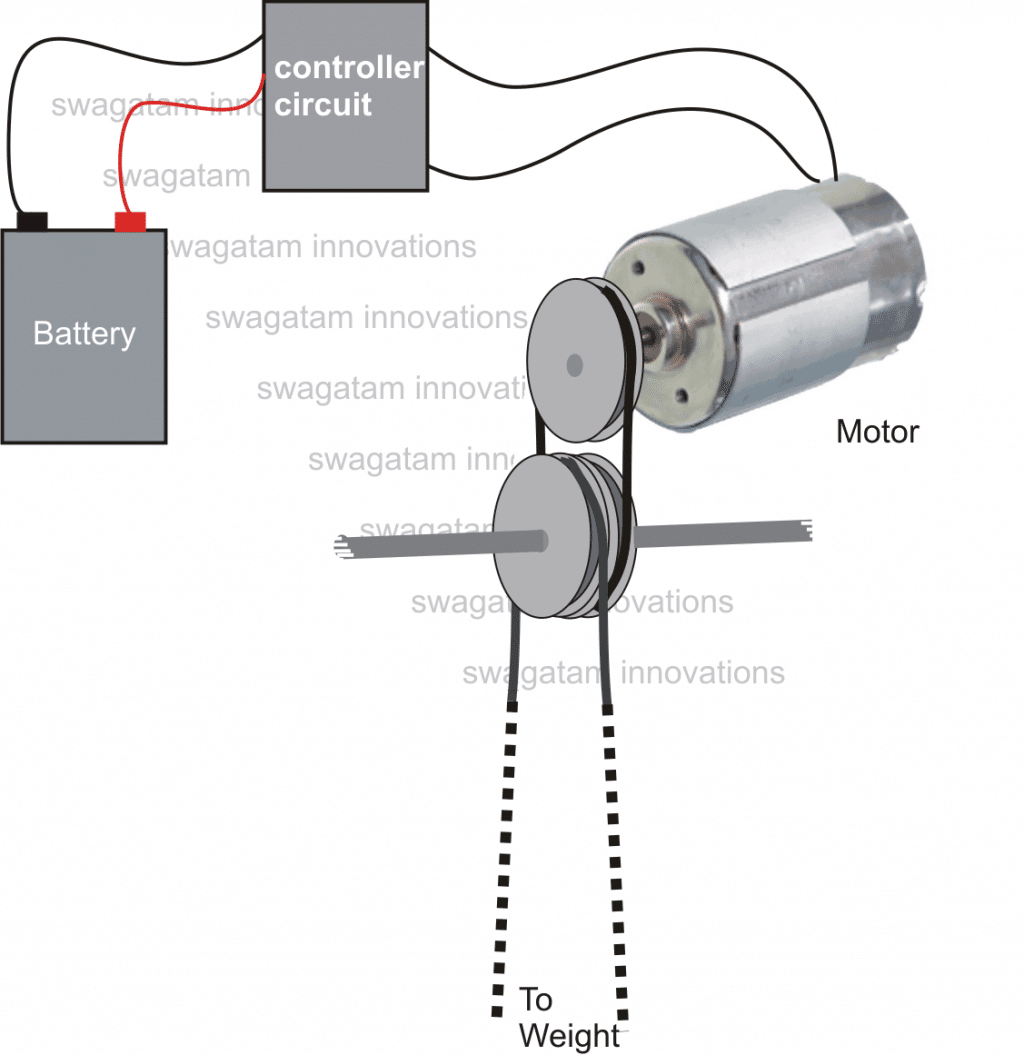
În aranjamentul electromecanic prezentat în figura de mai sus, putem vedea următoarele componente integrate:
Un angrenaj mic atașat cu un mecanism cu șurub.
Capul șurubului are o suprafață reflectorizantă albă
Un ansamblu LED / LDR poziționat în fața capului șurubului.
Cum funcționează mecanismul propus.
Angrenajul prezentat în figura de mai sus trebuie blocat cu un alt angrenaj având un raport care poate fi de 10 ori mai mare decât acest angrenaj.
Angrenajul mai mare trebuie să fie configurat cu mecanismul pedalei astfel încât să inițieze o mișcare de rotație ca răspuns la apăsarea pedalei.
Răspunsul de rotație de la angrenaje va produce, la rândul său, o mișcare înainte a capului șurubului peste camera în care se află ansamblul LED / LDR.
Procesul va face ca LDR să primească o cantitate variabilă proporțională de lumină reflectată de la LED.
Aceste date variabile (sub forma unei rezistențe variabile) corespunzătoare depresiunii pedalei pot fi apoi alimentate către un circuit de procesor de semnal pentru a impune controlul de viteză preconizat al vehiculului particular.
În următoarea postare vom învăța etapa procesorului de semnal folosind tehnica PWM.
În secțiunea de mai sus am aflat despre un ansamblu simplu de convertoare electromecanice pentru transformarea acțiunii pedalei într-un semnal electric care variază proporțional.
Conversia acțiunii pedalei în PWM
Acum, să studiem o implementare a circuitului care ne va permite să convertim semnalul electric al pedalei într-un semnal PWM care variază corespunzător pentru controlul dorit al vitezei motorului vehiculului.

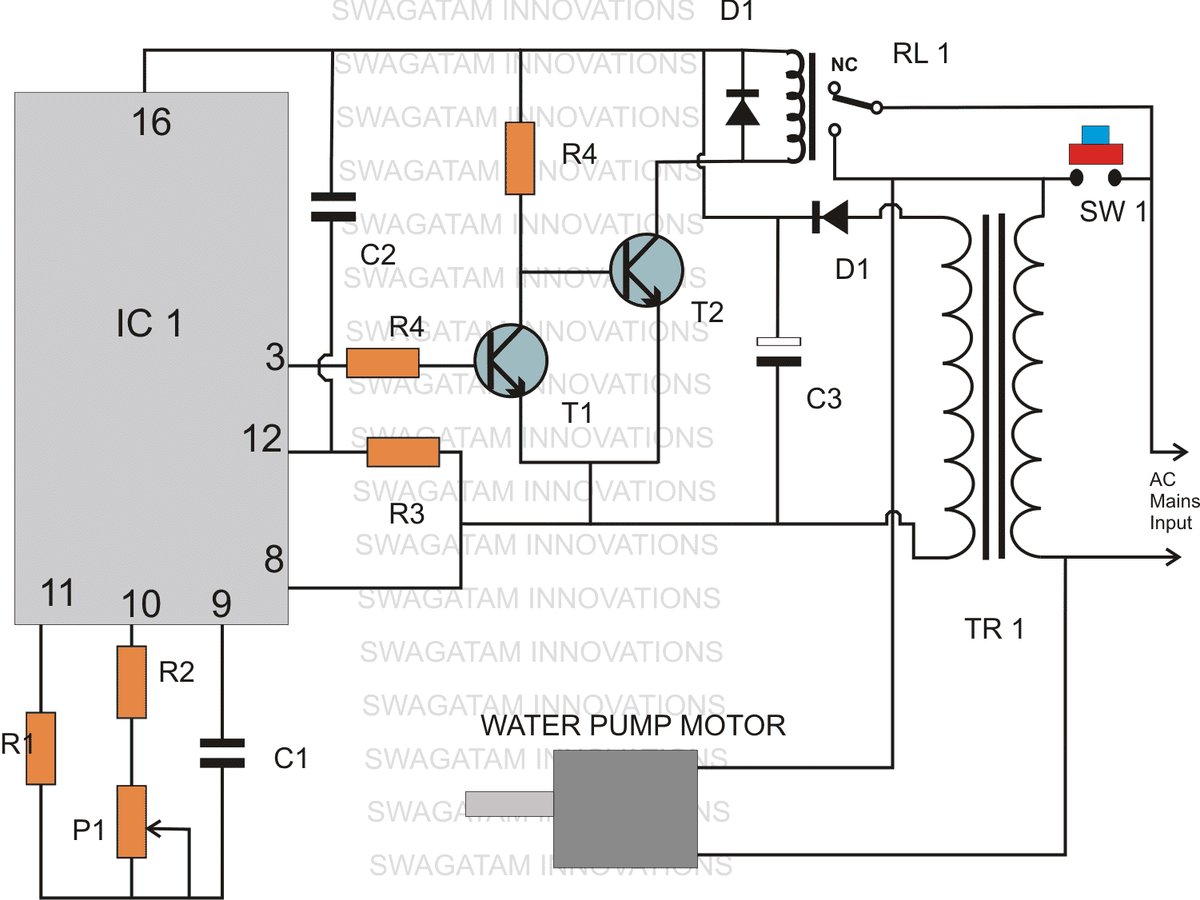
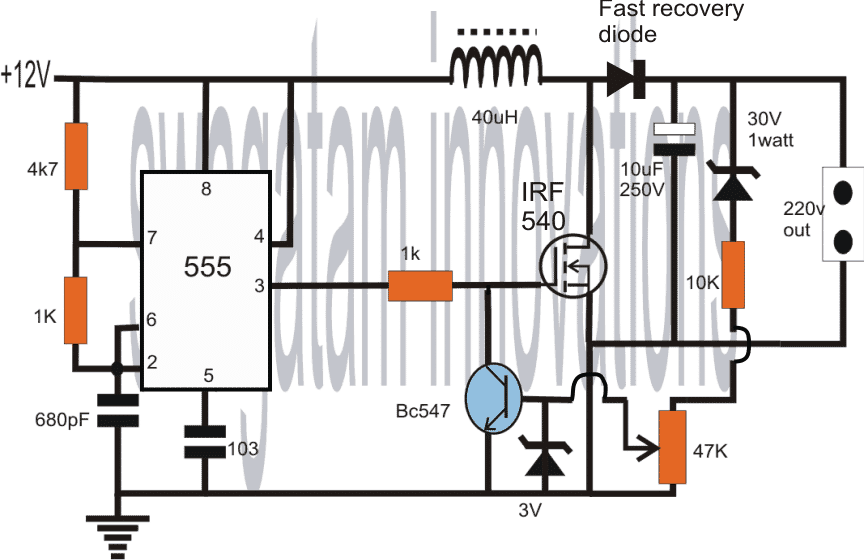
Referindu-ne la schema de circuit de mai sus, putem evalua funcționarea circuitului cu ajutorul următoarelor puncte:
IC1 este configurat ca un generator de impulsuri de 80Hz cu timp maxim de pornire și timp minim de oprire ca ciclu de funcționare
IC2 este echipat ca un comparator care convertește mai întâi impulsul de 80Hz de mai sus aplicat la pin-ul său cu unde triunghiulare generate la pin-ul său și compară undele triunghiulare cu tensiunea de modulare disponibilă la pin-ul său 5.
Tensiunea de modulare pin5 este derivată de la un emițător BJT BC547 care este configurat ca un colector comun cu baza sa conectată cu intrările LDR realizate din acțiunile pedalei.
Rezistențele variabile ca răspuns la apăsarea pedalei sunt comparate cu setarea presetată de 100K și o magnitudine proporțională a tensiunii este dezvoltată la baza tranzistorului, care convertește intrarea de curent scăzut într-un semnal echivalent de curent mare peste pinul 5 al IC2.
Acest nivel de potențial instantaneu este acceptat și procesat de IC2 generând magnitudinea proporțională a semnalelor PWM pentru mosfet și motorul conectat.
Viteza motorului este astfel controlată și variată conform PWM-urilor fluctuante ca răspuns la apăsarea pedalei vehiculului.
Procedurile de mai sus convertesc efectiv acțiunile pedalei într-o operațiune controlată a motorului vehiculului și a vitezei acestuia.
Cum se configurează circuitul.
Este foarte usor.
- Apăsați pedala până la punctul maxim astfel încât capul șurubului să ajungă în cea mai apropiată poziție posibilă în fața ansamblului LED / LDR.
- Apoi reglați presetarea de 100k până când pinul 3 al IC2 începe să genereze PWM-uri cu lățime maximă, acest lucru poate fi confirmat prin măsurarea tensiunii la pinul 3 pentru a fi cât mai aproape de tensiunea de alimentare a circuitului, adică 5V.
- Odată ce acest lucru este făcut, procedura de configurare ar putea fi presupusă a fi completă.
- Rezultatele pot fi acum verificate prin apăsarea pedalei la diferite niveluri și verificarea turației motorului variază în mod identic.
Precedent: Circuit simplu contor ESR Următorul: Cum să construiți un circuit de lumină de creștere