
De obicei, roboții de control de la distanță utilizează circuite RF, care au dezavantajele unei limite de lucru limitate, a unui control limitat și a unui interval de frecvență limitat. Pentru a depăși aceste dezavantaje, telefon mobil Land Rover se folosește vehicul robotizat. Oferă avantajele controlului robotizat, controlerelor fără intruziuni și până la douăsprezece sisteme de control etc.
Deși capacitățile și aspectul robotică încorporată variază foarte mult, toți roboții împărtășesc caracteristicile unei structuri mobile, mecanice, sub o anumită formă de control. Controlul roboților implică trei faze diferite: percepția, procesarea și acțiunea. În mod normal, senzorii sunt montați pe robot. Percepția și procesarea se face de către microcontrolerul de bord, iar acțiunea se efectuează folosind motoare.
Vehicul robotizat Land Rover operat cu telefonul mobil

Vehicul robotizat Land Rover operat de telefonul mobil de Edgefxkits.com
Principala intenție a acestui proiect este de a controla un braț robotizat care este montat pe un vehicul robotizat utilizând un telefon mobil. Oferă o gamă largă de lucru și un control robust etc.
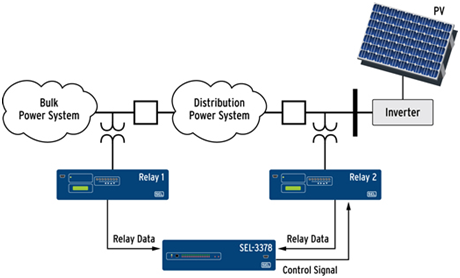
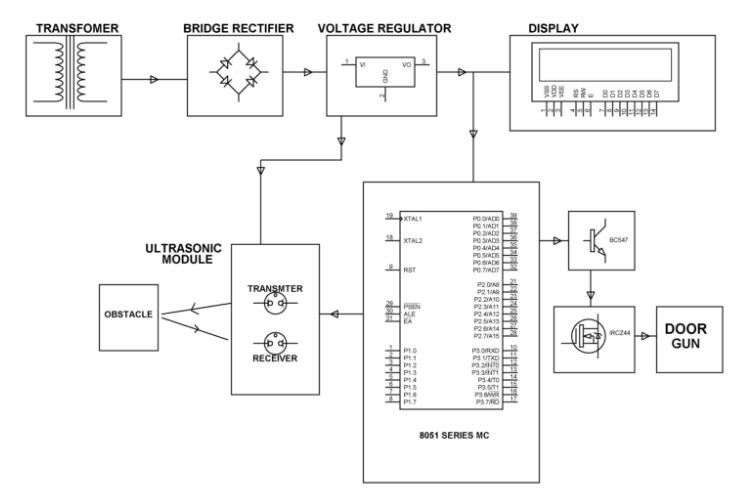
Diagrama bloc a vehiculului robot Land Rover operat cu telefonul mobil:

Diagrama bloc a Land Rover operat cu telefonul mobil
Principalele elemente de bază sunt microcontrolerul, telefonul mobil, decodorul DTMF și circuitul driverului DC-Motor. Telefonul mobil este cea mai importantă parte a întregului sistem, deoarece întregul sistem funcționează și este activat de telefonul mobil. DTMF (dublu ton cu frecvență multiplă) primește semnalul de intrare de pe telefonul mobil și îl decodează, apoi generează ieșire digitală pe 4 biți a 8051 microcontroler . Când decodorul DTMF oferă o ieșire digitală, generează, de asemenea, o întrerupere de fiecare dată.
Microcontrolerul este inima întregului sistem, deoarece efectuează toate acțiunile de control. Microcontrolerul depinde de codul generat de decodorul DTMF pentru a deplasa roverul spre dreapta sau spre stânga și înainte sau înapoi prin rotirea ambelor motoare de curent continuu. Driverul motorului continuu primește semnale de activare de la microcontroler în termeni de logică scăzută sau înaltă, apoi amplifică și rotește două motoare în ambele direcții.
Controlul robotului implică în principal patru faze diferite: percepția, procesarea acțiunii și detectarea. În etapa de percepție dacă telefonul mobil atașat la robot primește un apel, atunci acțiunea de apăsare a tastei de pe telefonul mobil decodează tonul DTMF generat. Apoi, cipul decodor primește semnalul audio de la telefonul mobil și apoi convertește tonul DTMF într-un cod binar, care este apoi alimentat la microcontroler. În acest proiect, un MT88710 IC este utilizat ca decodor DTMF. În etapa de procesare, microcontrolerul procesează codul binar care este primit de la decodorul DTMF. Microcontrolerul este preprogramat în „C” pentru a efectua această sarcină specială în funcție de biții de intrare.
În etapa de acțiune, rotația motoarelor depinde de intrarea dată de microcontroler. Două motoare de curent continuu fiecare de 30 RPM sunt utilizate pentru landrover și sunt acționate de IC-ul motorului. La detectarea scenei și pentru detectarea obstacolelor, un emițător și receptor în infraroșu sunt utilizate împreună cu buzzer-ul. Când obstacolul vine în fața robotului, transmițătorul IR transmite razele IR asupra obiectului, apoi obiectul reflectă razele IR către receptorul IR. Receptorul IR primește apoi razele IR pentru a activa soneria.
Diagrama circuitului vehiculului robot land rover operat cu telefonul mobil:
Principalele componente ale acestui robot landrover operat cu telefonul mobil sunt microcontrolerul, driverul motorului și decodorul DTMF. În acest proiect este utilizat un decodor DTMF din seria MT8870 care utilizează tehnici de numărare digitală pentru a detecta cele 16 perechi de tonuri DTMF într-o ieșire de cod pe 4 biți. Circuitul încorporat al tonului de apel elimină prefiltrarea. Dacă un semnal de intrare este dat la pin2, atunci configurația de intrare este recunoscută ca fiind eficientă. Semnalul de decodare pe 4 biți al tonului DTMF este transferat pinului 11 prin ieșirea pinului 14. Acești pini sunt conectați la pinii microcontrolerului Pao, Pa1, Pa2 și Pa3. Ieșirea microcontrolerului de la pinii de port PD0 până la PD3 și PD7 sunt alimentate la intrările IN1, IN4 și permite pinilor EN1, EN2 ai driverului de motor L293D IC să acționați cele două motoare de curent continuu .

Diagrama circuitului Land Rover operat cu telefonul mobil
În acest circuit, comutatorul S1 este utilizat pentru resetarea manuală. Ieșirea microcontrolerului nu este suficientă pentru a acționa motoarele de curent continuu, astfel încât driverele de curent sunt necesare pentru rotația motorului. Driverul de motor L293D este proiectat să furnizeze curenți de acționare bidirecționali de până la 600 mA la tensiuni de la 4,5V la 36V, ceea ce îl face mai ușor de acționat motoarele de curent continuu. Driverul motor L293D este format din patru drivere. Pinii IN1 până la IN4 și OUT1 și OUT4 sunt pinii de intrare și de ieșire ai driverului 1 până la driverul 4. Driverele 1,2,3 și 4 sunt activate de pinul de activare 1 (EN1) și pinul 9 (EN2). Când activarea intrării EN1 (pin1) este mare, driverele 1 și 2 sunt activate. În mod similar, intrarea de activare EN2 (pin9) permite driverelor 3.
Avantaje și dezavantaje:
Avantajele robotului landrover operat de telefonul mobil includ sisteme de supraveghere și supraveghere fără fir de control, navigarea vehiculelor bazată pe tehnologia 3G și o gamă operațională nelimitată bazată pe rețeaua telefonului mobil. Dezavantajul include: costul, deoarece facturarea telefonului mobil este mare descărcarea bateriilor mobile : problema de descărcare asociată cu bateriile, deoarece pierderea bateriilor se încarcă din cauza descărcării rapide, deoarece sarcina este mare de adaptabilitate: sistemul nu este adaptabil la toate telefoanele mobile, dar cele cu căștile atașate pot fi utilizate numai
Astfel, acest proiect robot cu telefon mobil este foarte util în aplicațiile militare pentru a controla vehiculele militare prin utilizarea unui telefon mobil. În viitor, putem detecta poziția inamicilor aranjând un camera wireless la vehiculul robot land rover. Acest proiect poate fi, de asemenea, util în mediul academic, deoarece studenții pot învăța diverse terminologii și principii propuse în acest proiect. Acest proiect îi va ajuta pe elevi să își adauge gândurile și ideile inovatoare dezvolta proiecte de robotica .
Credite foto:
- Land Rover operat de telefonul mobil de către santoshbanisetty
- Diagrama circuitului Land Rover operat de telefonul mobil de către ingineri garaj









{kind=link}