Roboții pot fi folosiți în multe aplicații în industrii, militare, interne. Una dintre principalele utilizări ale roboților este un atu pentru ființele umane. Fie că este vorba de orice fel de situații periculoase, cum ar fi izbucnirea unui incendiu sau un loc plin de mine terestre, roboții pot rezolva cu ușurință o cale de ieșire din aceste probleme. Deci, haideți să vedem aceste două tipuri de roboți - un robot de detectare a minelor terestre și un robot de stingere a incendiilor
Robot de detectare a minelor terestre
Cum să simți minea de teren cu roboți?
Una dintre cele mai importante aplicații ale roboticii este în apărare. Un robot din armată este un vehicul controlat de la distanță cu multe caracteristici unice. Poate fi un vehicul robotizat cu o cameră de spionat, un vehicul robotizat cu pistol LASER pentru detectarea și distrugerea țintelor sau un robot cu un detector de metale pentru a detecta prezența minelor terestre.
Una dintre modalitățile tradiționale și convenționale de detectare a minelor este utilizarea unor persoane antrenate care caută manual metale sau mine folosind un detector de metale. Cu toate acestea, acest lucru este nesigur și costisitor și, de asemenea, lent.
Pentru a depăși această problemă este preferat un sistem mult mai avansat.
Câteva moduri de a detecta minele terestre:
- Folosind un robot care poate introduce o sondă în sol, care poate detecta obiectele de sub sol și poate determina tipul de material.
- Folosirea unui robot cu un detector de metale care poate simți prezența elementelor conductoare precum minele terestre și poate alarma utilizatorul.
Înainte de a intra mai departe în detalii despre al doilea tip - adică robotul cu detector de metale, permiteți-ne să ne reamintim pe scurt cei doi termeni importanți - Minele terestre și Detectorul de metale.
LA Terenul meu este un dispozitiv exploziv plasat deliberat sub sol care explodează atunci când este declanșat de presiune. Potrivit unui raport statistic, există aproximativ 100 de milioane de mine terestre în 70 de țări din întreaga lume. O mină terestră odată plasată poate funcționa până la 50 de ani. Nu este periculos !!

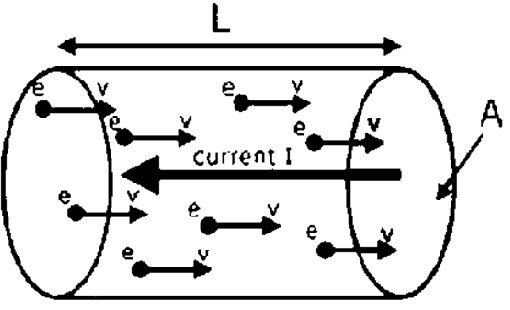
Un detector de metal de bază funcționează pe principiul legii inducției faraday. Acesta constă dintr-o bobină care este energizată pentru a dezvolta în jurul său un câmp magnetic pulsatoriu. Când bobina vine în vecinătatea unui element conductor precum metalul (o mină), în el se induce un curent electric (curent turbionar). Curentul turbionar indus determină dezvoltarea câmpului electromagnetic în jurul metalului, care este retransmis la bobina care dezvoltă un semnal electric care este analizat. Mai mare este distanța dintre bobină și metal, mai slab este câmpul magnetic.
Un prototip simplu:

Un prototip simplu de vehicul robotizat cu detector de metale
Proiectarea robotului:
Vehiculul robot constă din următoarele unități:
- O bază dreptunghiulară pentru a susține întreaga structură a robotului, atașată cu două roți pentru mișcare.
- Câteva motoare de curent continuu pentru a asigura mișcarea robotului.
- O unitate de control care constă dintr-un receptor RF care primește semnale de comandă de la o unitate transmițătoare pentru a controla driverul motorului și a controla motoarele în consecință.
- Odată ce metalul este detectat, se declanșează un circuit detector de metale împreună cu o alarmă sonoră.
Cum funcționează robotul:
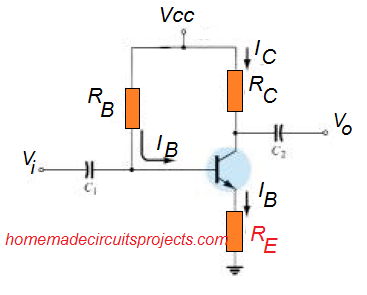
Circuitul detectorului de metale încorporat în circuitul de comandă al robotului constă dintr-un tranzistor care este acționat de un circuit oscilator reglat constând din bobină. Când este detectat un metal și curentul electric este retransmis prin bobină, tranzistorul 1 este în stare și conduce un alt tranzistor2 la starea oprită. La rândul său, acest tranzistor3 conduce un alt tranzistor la starea oprită. Acest tranzistor special 3 este conectat la un alt tranzistor4 care este conectat astfel încât să fie în stare când tranzistorul său driver3 este în stare oprită. Tranzistorul 4 este conectat astfel încât, în condiții, soneria și LED-ul să aibă o polarizare adecvată și să înceapă să conducă.

Diagrama bloc a unității detector de metale
LED-ul începe să aprindă și soneria începe să sune. Astfel, atunci când este detectat un metal, alarma sonoră va începe să sune și LED-ul va aprinde.
Controlul robotului:
Prototipul simplu poate fi controlat folosind comunicații RF, care este un sistem de comunicații cu rază scurtă de acțiune. Comenzile sunt transmise folosind un transmițător și primite de un receptor încorporat în circuitul robotului pentru a controla mișcarea robotului.

Diagrama bloc a secțiunii emițător
Transmițătorul constă dintr-un set de butoane precum înainte, înapoi, oprire, stânga și dreapta care sunt apăsate pentru a oferi mișcarea robotului în orice direcție dorită. Butoanele sunt conectate la portul de intrare al microcontrolerului. Microcontrolerul la recepționarea acestor semnale dezvoltă un semnal corespunzător de 4 biți în formă paralelă pe un alt port I / O, la care este conectat un IC de codificare. Codificatorul convertește aceste semnale într-o formă serială de date. Transmițătorul RF modulează aceste date seriale, care sunt transmise prin antenă.

Diagrama bloc a secțiunii receptorului
Secțiunea receptorului montată pe robot constă din receptorul RF care demodulează acest semnal. IC-ul decodorului primește acest semnal în formă serială și dezvoltă la ieșire date paralele corespunzătoare de 4 biți. Microcontrolerul primește aceste date și, în consecință, furnizează un semnal de control către driverul motorului IC LM293D, care acționează ambele motoare.
Vehicul robotizat de stingere a incendiilor:
Conceptul de vehicul robotizat de stingere a incendiilor luptă într-un incendiu. În ultimii ani au existat mai multe accidente grave, inclusiv explozii de incendiu și bombe. Am știut despre accidentele majore de incendiu, cum ar fi centralele nucleare, petrolul, rezervoarele de gaz și fabricile de produse chimice, companiile industriale de incendiu la scară largă din aceste locuri, odată ce au declanșat incendiul, pot rezulta foarte grav. Mii de oameni au murit în această incidență. Aceasta este o luptă împotriva incendiilor vehicul robotizat tehnologie. Acest vehicul robotizat obișnuia să găsească focul și să lupte pentru incendii.

Vehicul robotizat de stingere a incendiilor
Principiul de lucru al vehiculului robotizat de stingere a incendiilor:
Vehiculul robot încărcat cu un cisternă de apă. Pompa este controlată prin comunicații fără fir (comunicații RF și mobile). Capătul emițătorului conectat la butoane. Folosind acest buton, comenzile sunt trimise către receptor și momentul de control al robotului, ca înainte, înapoi, stânga, dreapta. Capătul receptor trei motoare sunt conectate la microcontroler.

Diagrama blocului transmițătorului

Diagrama blocului receptorului
Transmițătorul RF acționează ca telecomandă RF în cazul în care raza de acțiune este de 200 de metri. În casă, birouri și industrii, senzorii de incendiu sunt păstrați în anumite locuri când apare un incendiu lângă un senzor de incendiu. Senzorii au sensul că bitul corespunzător este transmis receptorului RF. Receptorul RF este integrat cu un microcontroler. Când receptorul RF primește semnalele că informațiile sunt transmise către microcontroler, robotul se deplasează spre senzorii de incendiu. Locațiile senzorilor sunt stocate în microcontroler. Odată ce robotul atinge locația dorită, atunci robotul se oprește și activează pulverizatorul la focul respectiv. După tragere, robotul merge în poziția inițială. Întregul circuit este controlat de microcontroler.
Tipuri de vehicule robotizate de stingere a incendiilor:
Vehicul robotizat pentru stingerea incendiilor la domiciliu :
Acțiunea pe teren este limitată la Flore-ul curent al casei. Acest robot folosește multe obiecte de uz casnic pentru a lua foc când cineva doarme sau este departe. Acest robot este folosit pentru a asigura locuința și folosind această aplicație, toate ușile sunt deschise în Flore, deoarece acest vehicul se deplasează într-un alt loc din casă. Zona de stingere a incendiilor trebuie să fie sigură pentru a nu cauza un nou accident. Caracteristica suplimentară a acestui robot este să funcționeze la distanță mare.
Pompieri industriale:
Majoritatea industriilor se confruntă cu probleme de accidente de incendiu, cum ar fi gazul, benzina, centralele nucleare, industriile chimice au avut un număr mare de daune și mai multe persoane au murit în apropierea zonelor înconjurătoare. Acest robot are puterea de a purta foc în interiorul zonei de ardere pentru a furniza apă nelimitată. Incendiul cauzează vizibilitate redusă, căldură extremă și multe alte situații care pot duce la răniri.
Combaterea incendiilor forestiere:
Incendiile forestiere sunt foarte periculoase. Poate fi o perioadă scurtă de timp arderea unei cantități mari de suprafață de pădure. Chiar și departamentele de pompieri din oraș trebuie să se ocupe de incendiile de pădure din zona care înconjoară orașul. Cu câțiva ani în urmă, aproximativ 152 de pompieri au fost uciși în anii '90. Robotica de incendiu forestier o folosește pentru a prinde focul și lupta împotriva focului. Acest robot folosește un dispozitiv de control extern în scopuri de comunicare fără fir. Modulul este conectat cu al cărui capăt de ieșire este utilizat pentru stingerea incendiului forestier al robotului. Aplicațiile precum senzorul de presiune, senzorul de temperatură, senzorul de fum, senzorul cu infraroșu sunt utilizate pentru controlul robotului de stingere a incendiilor forestiere.
La prompt!
În timp ce mi-am dat o idee de bază despre robotul cu detector de metale, există încă o întrebare majoră - Cum să ghidăm robotul pe terenuri denivelate care nu sunt cunoscute, în special în mediile supuse ploilor abundente, prafului și intervalului de temperatură fierbinte. Pentru a găsi un răspuns și a posta comentariile dvs.