
Un motor pas cu pas este un dispozitiv electromecanic care transformă puterea electrică în putere mecanică. De asemenea, este un motor electric fără perii, sincron, care poate împărți o rotație completă într-un număr expansiv de trepte. Poziția motorului poate fi controlată cu precizie fără niciun mecanism de feedback, atâta timp cât motorul este dimensionat cu atenție la aplicație. Motoarele pas cu pas sunt similare cu cele comutate motoare de reticență. Motorul pas cu pas folosește teoria de funcționare pentru magneți pentru a face ca arborele motorului să se întoarcă la o distanță precisă atunci când este furnizat un impuls de electricitate. Statorul are opt poli, iar rotorul are șase poli. Rotorul va necesita 24 de impulsuri de energie electrică pentru a deplasa cele 24 de trepte pentru a face o revoluție completă. O altă modalitate de a spune acest lucru este că rotorul se va deplasa cu precizie de 15 ° pentru fiecare impuls de energie electrică pe care îl primește motorul.
Principiul construcției și funcționării
construirea unui motor pas cu pas este destul de legat de un Motor DC . Include un magnet permanent precum rotorul care se află în mijloc și se va întoarce odată ce forța acționează asupra acestuia. Acest rotor este închis printr-un nr. a statorului care este înfășurat printr-o bobină magnetică peste tot. Statorul este dispus în apropierea rotorului, astfel încât câmpurile magnetice din statori să poată controla mișcarea rotorului.

Motor pas cu pas
Motorul pas cu pas poate fi controlat prin alimentarea fiecărui stator unul câte unul. Deci, statorul va magnetiza și funcționează ca un pol electromagnetic care folosește energie respingătoare pe rotor pentru a avansa. Magnetizarea alternativă a statorului, precum și demagnetizarea, vor schimba rotorul treptat și îi vor permite să treacă printr-un control excelent.
principiul de funcționare a motorului pas cu pas este electromagnetismul. Acesta include un rotor care este realizat cu un magnet permanent, în timp ce un stator este cu electro-magneți. Odată furnizat alimentarea înfășurării statorului, câmpul magnetic va fi dezvoltat în interiorul statorului. Acum rotorul din motor va începe să se miște cu câmpul magnetic rotativ al statorului. Deci acesta este principiul fundamental de funcționare al acestui motor.

Construcție motor pas cu pas
În acest motor, există un fier de călcat moale care este închis prin statorii electromagnetici. Polii statorului, precum și rotorul nu depind de tipul de pas cu pas. Odată ce statorii acestui motor sunt energizați, atunci rotorul se va roti pentru a se alinia cu statorul, altfel se întoarce pentru a avea cel mai mic spațiu prin stator. În acest fel, statorii sunt activați într-o serie pentru a roti motorul pas cu pas.
Tehnici de conducere
Tehnica de conducere a motorului pas cu pas Poate fi posibil cu unele circuite speciale datorită designului lor complex. Există mai multe metode de acționare a acestui motor, unele dintre ele sunt discutate mai jos luând un exemplu de motor cu patru faze pas cu pas.
Mod unic de excitație
Metoda de bază de a conduce un motor pas cu pas este un singur mod de excitație. Este o metodă veche și nu este folosită prea mult în prezent, dar trebuie să știți despre această tehnică. În această tehnică, fiecare fază, altfel stator una lângă alta, va fi declanșată una câte una alternativ cu un circuit special. Acest lucru va magnetiza și demagnetiza statorul pentru a deplasa rotorul înainte.
Unitate cu pas complet
În această tehnică, doi statori sunt activați simultan în loc de unul într-o perioadă de timp foarte redusă. Această tehnică are ca rezultat un cuplu ridicat și permite motorului să conducă sarcina mare.
Drive în jumătate de pas
Această tehnică este legată destul de mult de unitatea cu pas complet, deoarece cei doi statori vor fi aranjați unul lângă celălalt, astfel încât să fie activat mai întâi, în timp ce al treilea va fi activat după aceea. Acest tip de ciclu pentru comutarea a două statori mai întâi și după acel al treilea stator va acționa motorul. Această tehnică va avea ca rezultat îmbunătățirea rezoluției motorului pas cu pas în timp ce scade cuplul.
Micro Stepping
Această tehnică este utilizată cel mai frecvent datorită acurateței sale. Curentul pas variabil va fi furnizat de circuitul driverului motorului pas cu pas spre bobinele statorice sub forma unei forme de undă sinusoidale. Precizia fiecărui pas poate fi îmbunătățită de acest curent de pas mic. Această tehnică este utilizată pe scară largă, deoarece oferă o precizie ridicată, precum și scade în mare măsură zgomotul de funcționare.
Circuitul motorului pas cu pas și funcționarea acestuia
Motoarele pas cu pas funcționează diferit de Motoare cu perie continuă , care se rotesc când se aplică tensiune la bornele lor. Motoarele pas cu pas, pe de altă parte, au în mod efectiv mai mulți electro magneți dințate dispuși în jurul unei bucăți de fier în formă de angrenaj central. Electro-magneții sunt alimentați de un circuit de control extern, de exemplu, un microcontroler.

Circuit motor pas cu pas
Pentru a face rotirea arborelui motorului, mai întâi i se dă putere unui electromagnet, ceea ce face ca dinții angrenajului să fie atrași magnetic de dinții electromagnetului. În momentul în care dinții angrenajului sunt astfel aliniați la primul electromagnet, acestea sunt ușor decalate față de următorul electromagnet. Deci, atunci când următorul electromagnet este pornit și primul este oprit, angrenajul se rotește ușor pentru a se alinia cu următorul și de acolo procesul se repetă. Fiecare dintre aceste rotații ușoare se numește pas, cu un număr întreg de pași care face o rotație completă.
În acest fel, motorul poate fi rotit cu o precizie. Motorul pas cu pas nu se rotește continuu, se rotește în trepte. Există 4 bobine cu 90sauunghi între ele fixat pe stator. Conexiunile motorului pas cu pas sunt determinate de modul în care bobinele sunt interconectate. Într-un motor pas cu pas, bobinele nu sunt conectate. Motorul are 90saupas de rotație cu bobinele fiind energizate într-o ordine ciclică, determinând direcția de rotație a arborelui.
Funcționarea acestui motor este arătată prin acționarea comutatorului. Bobinele sunt activate în serie la intervale de 1 sec. Arborele se rotește cu 90saude fiecare dată când bobina următoare este activată. Cuplul său de viteză redusă va varia direct cu curentul.
Tipuri de motor pas cu pas
Există trei tipuri principale de motoare pas cu pas, acestea sunt:
- Pas cu magnet permanent
- Stepper sincron hibrid
- Pașă de reticență variabilă
Motor pas cu pas cu magnet permanent
Motoarele cu magnet permanent utilizează un magnet permanent (PM) în rotor și acționează pe atracția sau repulsia dintre rotorul PM și electromagnetii statorului.
Acesta este cel mai comun tip de motor pas cu pas comparativ cu diferite tipuri de motoare pas cu pas disponibile pe piață. Acest motor include magneți permanenți în construcția motorului. Acest tip de motor este, de asemenea, cunoscut sub numele de motor de staniu / stivuitor. Principalul beneficiu al acestui motor pas cu pas este costul de fabricație mai mic. Pentru fiecare revoluție, are 48-24 de pași.
Motor pas cu pas cu reticență variabilă
Motoarele cu reluctanță variabilă (VR) au un rotor de fier simplu și funcționează pe baza principiului că reluctanța minimă apare cu un spațiu minim, prin urmare punctele rotorului sunt atrase către polii magnetului statorului.
Motorul pas cu pas ca reluctanța variabilă este tipul de bază al motorului și este utilizat în ultimii ani. După cum sugerează și numele, poziția unghiulară a rotorului depinde în principal de reticența circuitului magnetic care se poate forma printre dinții statorului, precum și a unui rotor.
Motor pas cu pas sincron hibrid
Motoarele pas cu pas hibride sunt denumite deoarece utilizează o combinație de magnet permanent (PM) și tehnici de reluctanță variabilă (VR) pentru a atinge puterea maximă în ambalaje mici.
Cel mai popular tip de motor este motor pas cu pas hibrid deoarece oferă o performanță bună în comparație cu un rotor cu magnet permanent în ceea ce privește viteza, rezoluția pasului și cuplul de menținere. Dar acest tip de motor pas cu pas este scump în comparație cu motoarele pas cu pas cu magnet permanent. Acest motor combină caracteristicile atât ale magnetului permanent, cât și ale motoarelor pas cu pas cu reticență variabilă. Aceste motoare sunt utilizate acolo unde este necesar un unghi de pas mai mic, cum ar fi 1,5, 1,8 și 2,5 grade.
Cum să selectați un motor pas cu pas?
Înainte de a selecta un motor pas cu pas pentru cerințele dvs., este foarte semnificativ să examinați curba cuplu-viteză a motorului. Deci, aceste informații sunt disponibile de la proiectantul motorului și reprezintă un simbol grafic al cuplului motorului la o viteză specificată. Curba cuplului-turație a motorului trebuie să se potrivească îndeaproape cu necesitățile aplicației sau, altfel, performanța așteptată a sistemului nu poate fi obținută.
Tipuri de cabluri
Motoarele pas cu pas sunt, în general, motoare bifazate, cum ar fi unipolare altfel bipolare. Pentru fiecare fază dintr-un motor unipolar, există două înfășurări. Aici, atingerea centrală este un fir comun între două înfășurări către un stâlp. Motorul unipolar are 5 până la 8 conductoare.
În construcție, unde comunul a doi poli este împărțit, oricât ar fi fost centrat, acest motor pas cu pas include șase conductoare. Dacă robinetele centrale cu doi poli sunt scurte în interior, atunci acest motor include cinci conductoare. Unipolarul cu 8 conductoare va facilita atât conexiunea în serie, cât și cea paralelă, în timp ce motorul cu cinci sau șase conductoare are conexiunea în serie a bobinei statorice. Funcționarea motorului unipolar poate fi simplificată deoarece, în timpul funcționării acestora, nu este necesară inversarea fluxului de curent în circuitul de acționare, care sunt cunoscute sub numele de motoare bifilare.
Într-un motor pas cu pas bipolar, pentru fiecare pol, există o singură înfășurare. Direcția de alimentare trebuie să se schimbe prin circuitul de acționare, astfel încât să devină complex, astfel încât aceste motoare sunt numite motoare unifilare.
Controlul motorului pas cu pas prin impulsuri variate de ceas
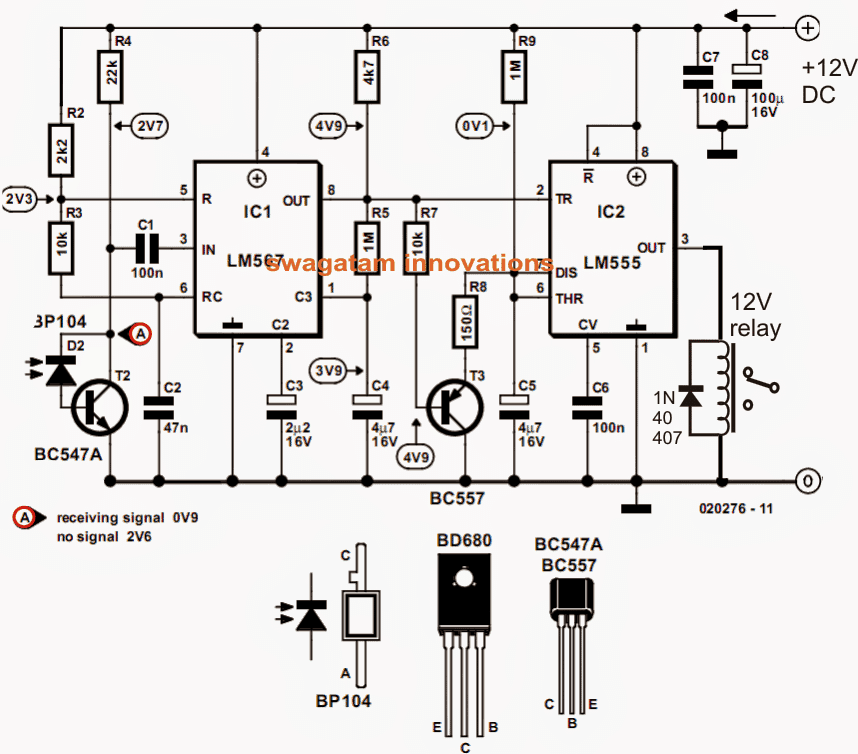
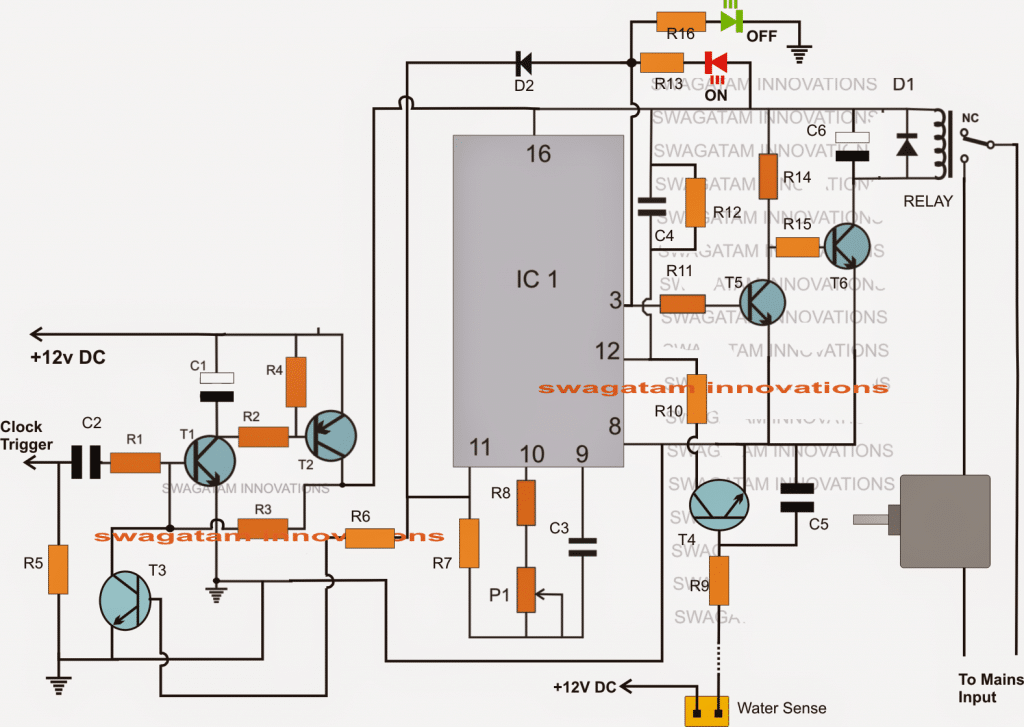
Comanda motorului pas cu pas circuitul este un circuit simplu și cu costuri reduse, utilizat în principal în aplicații cu putere redusă. Circuitul este prezentat în figură, care constă din 555 temporizatoare IC ca un multi-vibrator stabil. Frecvența este calculată utilizând relația dată.
Frecvența = 1 / T = 1,45 / (RA + 2RB) C Unde RA = RB = R2 = R3 = 4,7 kilo-ohm și C = C2 = 100 µF.

Controlul motorului pas cu pas prin impulsuri variate de ceas
Ieșirea temporizatorului este utilizată ca ceas pentru două flip-flop-uri 7474 duale (U4 și U3) configurate ca contor de sonerie. Când alimentarea este pornită inițial, doar primul flip-flop este setat (adică ieșirea Q la pinul 5 al U3 va fi la logica '1') și celelalte trei flip-flop-uri sunt resetate (adică ieșirea lui Q este la logică 0). La primirea unui impuls de ceas, ieșirea logică „1” a primului flip-flop se deplasează pe al doilea flip-flop (pinul 9 al U3).
Astfel, ieșirea logică 1 continuă să se deplaseze circular cu fiecare impuls de ceas. Ieșirile Q ale tuturor celor patru flip-flops sunt amplificate de matrice de tranzistori Darling-ton în interiorul ULN2003 (U2) și conectate la înfășurările motorului pas cu pas portocaliu, maro, galben, negru la 16, 15,14, 13 din ULN2003 și roșu la + am furnizat.
Punctul comun al înfășurării este conectat la alimentarea + 12V DC, care este conectată și la pinul 9 al ULN2003. Codul de culoare utilizat pentru înfășurări poate varia de la marcă la marcă. Când alimentarea este pornită, semnalul de control conectat la pinul SET al primului flip-flop și pinii CLR ai celorlalte trei flip-flop-uri este activ „scăzut” (din cauza circuitului de pornire-resetare format de R1 -C1 combinație) pentru a seta primul flip-flop și a reseta restul de trei flip-flop-uri.
La resetare, Q1 al IC3 devine „ridicat”, în timp ce toate celelalte ieșiri Q devin „reduse”. O resetare externă poate fi activată apăsând comutatorul de resetare. Apăsând comutatorul de resetare, puteți opri motorul pas cu pas. Motorul începe din nou să se rotească în aceeași direcție prin eliberarea comutatorului de resetare.
Diferența dintre motorul pas cu pas și motorul servo
Servomotorele sunt potrivite pentru aplicații de cuplu și turație ridicate, în timp ce motorul pas cu pas este mai puțin costisitor, astfel încât acestea sunt utilizate acolo unde este necesar un cuplu ridicat de menținere, o accelerație cu un nivel scăzut până la mediu, flexibilitatea de funcționare deschisă, altfel închisă. Diferența dintre motorul pas cu pas și motorul servo include următoarele.
| Motor pas cu pas | Servo motor |
| Motorul care se deplasează în trepte discrete este cunoscut sub numele de motor pas cu pas. | Un servomotor este un tip de motor cu buclă închisă care este conectat la un codificator pentru a oferi feedback de viteză și poziție.
|
| Motorul pas cu pas este utilizat acolo unde controlul, precum și precizia, sunt priorități principale | Servomotorul este utilizat acolo unde viteza este prioritatea principală
|
| Numărul total de poli al motorului pas cu pas variază de la 50 la 100 | Numărul total de poli ai servomotorului variază de la 4 la 12 |
| Într-un sistem cu buclă închisă, aceste motoare se mișcă cu un impuls consistent | Aceste motoare au nevoie de un codificator pentru a schimba impulsurile pentru a controla poziția.
|
| Cuplul este mare la viteză mai mică | Cuplul este redus la viteză mare |
| Timpul de poziționare este mai rapid în cursele scurte | Timpul de poziționare este mai rapid pe parcursuri lungi |
| Mișcarea de inerție cu toleranță ridicată | Mișcarea de inerție cu toleranță redusă |
| Acest motor este potrivit pentru mecanisme cu rigiditate redusă, cum ar fi scripetele și cureaua | Nu este potrivit pentru mecanismul de rigiditate mai mică |
| Capacitatea de reacție este mare | Capacitatea de reacție este redusă |
| Acestea sunt utilizate pentru sarcini fluctuante | Acestea nu sunt utilizate pentru sarcini fluctuante |
| Reglarea câștigului / reglării nu este necesară | Este necesară ajustarea câștigului / reglării |
Motor pas cu pas vs Motor DC
Atât motoarele pas cu pas, cât și cele de curent continuu sunt utilizate în diferite aplicații industriale, dar principalele diferențe dintre aceste două motoare sunt puțin confuze. Aici, enumerăm câteva caracteristici comune între aceste două modele. Fiecare caracteristică este discutată mai jos.
Caracteristici | Motor pas cu pas | Motor DC |
| Caracteristici de control | Simplu și folosește microcontroler | Simplu și nu sunt necesare extras |
| Gama de viteză | Minim de la 200 la 2000 RPM | Moderat |
| Fiabilitate | Înalt | Moderat |
| Eficienţă | Scăzut | Înalt |
| Caracteristici de cuplu sau viteză | Cel mai mare cuplu la viteze mai mici | Cuplu mare la viteze mai mici |
| Cost | Scăzut | Scăzut |
Parametrii motorului pas cu pas
Parametrii motorului pas cu pas includ în principal unghi de pas, trepte pentru fiecare rotație, trepte pentru fiecare secundă și RPM.
Unghiul pasului
Unghiul de pas al motorului pas cu pas poate fi definit ca unghiul la care rotitorul motorului se rotește odată ce un singur impuls este dat la intrarea statorului. Rezoluția motorului poate fi definită ca numărul de trepte ale motorului și numărul de rotații ale rotorului.
Rezoluție = Numărul de pași / Numărul de revoluție al rotorului
Aranjamentul motorului poate fi decis prin unghiul de pas și este exprimat în grade. Rezoluția unui motor (numărul pasului) este nr. de trepte care fac într-o singură rotație a rotorului. Când unghiul de pas al motorului este mic, atunci rezoluția este mare pentru aranjarea acestui motor.
Exactitatea aranjamentelor obiectelor prin intermediul acestui motor depinde în principal de rezoluție. Odată ce rezoluția este mare, atunci precizia va fi scăzută.
Unele motoare de precizie pot crea 1000 de pași într-o singură rotație, inclusiv 0,36 grade de unghi de pas. Un motor tipic include 1,8 grade de unghi de pas cu 200 de trepte pentru fiecare rotație. Diferitele unghiuri de pas, cum ar fi 15 grade, 45 grade și 90 de grade, sunt foarte frecvente în motoarele normale. Numărul de unghiuri se poate schimba de la două la șase, iar un unghi de pas mic poate fi atins prin intermediul unor părți ale polului.
Pași pentru fiecare revoluție
Pașii pentru fiecare rezoluție pot fi definiți ca numărul de unghiuri de pas necesare pentru o revoluție totală. Formula pentru aceasta este 360 ° / Step Unghiul.
Pași pentru fiecare secundă
Acest tip de parametru este utilizat în principal pentru măsurarea numărului de pași parcurși în fiecare secundă.
Revoluție pe minut
RPM este revoluția pe minut. Este folosit pentru a măsura frecvența revoluției. Deci, folosind acest parametru, putem calcula numărul de rotații într-un singur minut. Relația principală dintre parametrii motorului pas cu pas este ca următoarea.
Pași pentru fiecare secundă = Revoluție pe minut x Pași pe revoluție / 60
Interfațarea motorului pas cu pas cu microcontrolerul 8051
Interfața motorului pas cu pas cu 8051 este foarte simplă prin utilizarea a trei moduri, cum ar fi unitatea de undă, unitatea cu pas complet și unitatea cu jumătate de pas, oferind 0 & 1 celor patru fire ale motorului, în funcție de modul de acționare pe care trebuie să îl alegem pentru funcționarea acestui motor.
Restul de două fire trebuie să fie cuplate la o sursă de tensiune. Aici se folosește motorul pas cu pas unipolar în care cele patru capete ale bobinelor sunt conectate la primii patru pini ai portului 2 din microcontroler folosind ULN2003A.
Acest microcontroler nu furnizează suficient curent pentru a acționa bobinele, astfel încât driverul curent IC îi place ULN2003A. ULN2003A trebuie utilizat și este colecția a 7 perechi de tranzistoare NPN Darlington. Proiectarea perechii Darlington poate fi realizată prin intermediul a două tranzistoare bipolare care sunt conectate pentru a obține o amplificare maximă a curentului.
În driverul IC ULN2003A, pinii de intrare sunt 7, pinii de ieșire sunt 7, unde doi pini sunt pentru surse de alimentare și terminale de masă. Aici se utilizează pini cu 4 intrări și 4 ieșiri. Ca alternativă la ULN2003A, IC L293D este, de asemenea, utilizat pentru amplificarea curentului.
Trebuie să observați foarte atent două fire comune și patru fire bobine, altfel motorul pas cu pas nu se va roti. Acest lucru poate fi observat prin măsurarea rezistenței printr-un multimetru, dar acesta nu va afișa nicio citire între cele două faze ale firelor. Odată ce firul comun și celelalte două fire sunt în fază egală, atunci acesta trebuie să prezinte o rezistență similară, în timp ce cele două bobine puncte de finisare în faza similară vor demonstra rezistența dublă în comparație cu rezistența dintre punctele comune, precum și un punct final.
Depanare
- Depanarea este procesul de verificare a stării motorului, indiferent dacă motorul funcționează sau nu. Următoarea listă de verificare este utilizată pentru depanarea motorului pas cu pas.
- Mai întâi, verificați conexiunile, precum și codul circuitului.
- Dacă este în regulă, verificați apoi dacă motorul primește o tensiune adecvată sau altfel pur și simplu vibrează, dar nu se rotește.
- Dacă alimentarea cu tensiune este bună, verificați punctele finale ale celor patru bobine care sunt aliate ULN2003A IC.
- Mai întâi, descoperiți cele două puncte finale generale și fixați-le la sursa de alimentare de 12V, după care fixați cele patru fire reziduale la IC ULN2003A. Până la pornirea motorului pas cu pas, încercați toate combinațiile posibile. Dacă conexiunea nu este corectă, atunci acest motor va vibra în locul rotației.
Pot motorul Stepper să ruleze continuu?
În general, toate motoarele funcționează sau se rotesc continuu, dar majoritatea motoarelor nu se pot opri în timp ce sunt alimentate.
Alternativ, motoarele pas cu pas sunt proiectate pentru a face un pas discret, apoi așteptați din nou pasul și rămâneți acolo. Dacă vrem să facem motorul să rămână într-o singură locație pentru mai puțin timp înainte de a păși din nou, atunci va arăta ca să se rotească continuu. Consumul de energie al acestor motoare este ridicat, dar disiparea de energie apare în principal odată ce motorul este oprit sau proiectat prost, atunci există șansa de supraîncălzire. Din acest motiv, alimentarea curentă a motorului scade frecvent odată ce motorul este într-o poziție de menținere pentru o perioadă mai lungă de timp.
Motivul principal este că, odată ce motorul se rotește, partea sa de putere electrică de intrare poate fi schimbată în putere mecanică. Când motorul este oprit în timp ce se rotește, atunci toată puterea de intrare poate fi transformată în căldură în interiorul bobinei.
Avantaje
avantajele motorului pas cu pas include următoarele.
- Rugozitate
- Construcție simplă
- Poate funcționa într-un sistem de control cu buclă deschisă
- Întreținerea este redusă
- Funcționează în orice situație
- Fiabilitatea este mare
- Unghiul de rotație al motorului este proporțional cu impulsul de intrare.
- Motorul are un cuplu maxim la oprire.
- Poziționarea precisă și repetabilitatea mișcării, deoarece motoarele pas cu pas bune au o precizie de 3-5% dintr-o treaptă și această eroare este necumulativă de la o treaptă la alta.
- Răspuns excelent la pornire, oprire și inversare.
- Foarte fiabil, deoarece nu există perii de contact în motor. Prin urmare, durata de viață a motorului depinde pur și simplu de durata de viață a rulmentului.
- Răspunsul motorului la impulsurile de intrare digitale asigură controlul în buclă deschisă, făcând motorul mai simplu și mai puțin costisitor de controlat.
- Este posibil să se realizeze o rotație sincronă de viteză foarte mică cu o sarcină care este cuplată direct la arbore.
- Se poate realiza o gamă largă de viteze de rotație, deoarece viteza este proporțională cu frecvența impulsurilor de intrare.
Dezavantaje
dezavantaje ale motorului pas cu pas include următoarele.
- Eficiența este scăzută
- Cuplul motorului va scădea rapid cu viteza
- Precizia este scăzută
- Feedback-ul nu este utilizat pentru specificarea potențialilor pași ratați
- Cuplu mic spre raportul de inerție
- Extrem de zgomotos
- Dacă motorul nu este controlat corespunzător, atunci pot apărea rezonanțe
- Funcționarea acestui motor nu este ușoară la viteze foarte mari.
- Este necesar circuitul de comandă dedicat
- În comparație cu motoarele de curent continuu, folosește mai mult curent
Aplicații
aplicații ale motorului pas cu pas include următoarele.
- Mașini industriale - Motoarele pas cu pas sunt utilizate în aparatele de măsură și echipamentele de producție automatizate pentru mașini-unelte.
- Securitate - noi produse de supraveghere pentru industria de securitate.
- Medical - Motoarele pas cu pas sunt utilizate în scanere medicale, probe și se găsesc și în fotografiile dentare digitale, pompele de lichide, aparatele de respirat și mașinile de analiză a sângelui.
- Electronice de consum - Motoare pas cu pas în camere pentru focalizarea automată a camerei digitale și funcții de zoom.
Și au, de asemenea, aplicații pentru mașini de afaceri, aplicații periferice de calculator.
Astfel, totul este vorba o prezentare generală a motorului pas cu pas cum ar fi construcția, principiul de funcționare, diferențele, avantajele, dezavantajele și aplicațiile sale. Acum aveți o idee despre tipurile de super-motoare și aplicațiile lor dacă aveți întrebări cu privire la acest subiect sau electric și proiecte electronice lăsați comentariile de mai jos.
Credit foto
- Motor pas cu pas MST






{kind=link}