O scurtă introducere a unui robot:
Un robot este orice mașină care este complet automată, adică pornește de la sine, decide propriul mod de lucru și se oprește de la sine. Este de fapt o replică a ființei umane, care a fost concepută pentru a ușura povara umană. Poate fi controlat pneumatic sau folosind căi hidraulice sau folosind căile electronice simple de control. Primul robot industrial a fost Unimates construit de George Devol și Joe Engelberger la sfârșitul anilor '50 și începutul anilor '60.
Orice robot este construit pe baza a 3 legi de bază definite de autorul științifico-fantastic rus Isaac Asimov:
- Un robot nu ar trebui să dăuneze ființei umane direct sau indirect.
- Un robot ar trebui să respecte ordinele umane, cu excepția cazului în care și până când încalcă prima lege.
- Un robot ar trebui să-și protejeze propria existență, cu condiția ca primele două legi să nu fie încălcate.

Un robot fix
Roboții pot fi roboți fixi sau roboți mobili. Roboții mobili sunt roboți cu o bază mobilă care îl face să se deplaseze liber în mediu. Unul dintre roboții mobili avansați este robotul Line Follower. Este practic un robot care urmează o anumită cale sau traiectorie și decide propriul său curs de acțiune care interacționează cu obstacolul. Calea poate fi o linie neagră pe podeaua albă (vizibilă) sau un câmp magnetic (invizibil). Aplicațiile sale încep de la utilizări casnice de bază la utilizări industriale, etc. Condiția actuală în industrie este că transportă coletele sau materialele dintr-un loc în altul folosind sistemul macaralei. Uneori, ridicarea unor greutăți mari în acel moment poate provoca ruperea materialelor de ridicat și poate provoca daune și coletelor. Linia care urmează roboți este utilizată în mod obișnuit pentru transportul copiilor prin centre comerciale, case, locuri de divertisment, industrii. Utilizarea liniei următoare vehicul robotizat transportă materialele dintr-un loc în altul din industrii. Această mișcare a robotului depinde complet de pistă. Robotul poate face orice ai făcut. La fel ca în fabrici, tot ce au de-a face cu fabricarea produselor lor este fabricarea robotului.

Un robot mobil
Robot de linie
Un robot care urmărește linia este un robot care urmează o anumită cale controlată de un mecanism de reacție.
Construirea unui robot de linie de bază:
Construirea unui robot de bază Line Follower presupune următorii pași.
- Proiectarea părții mecanice sau a corpului robotului
- Definirea cinematicii roboților
- Proiectarea controlului robotului

Un robot de linie
Partea mecanică sau corpul robotului pot fi proiectate folosind AutoCAD sau Workspace. Un robot liniar de bază poate consta dintr-o bază la cele două capete ale căror roți sunt montate. O bază dreptunghiulară din plastic dur poate fi utilizată ca bază. Mai mult, un corp rigid ca un cilindru poate fi adăugat împreună cu alte corpuri de formă interconectate între ele prin articulații și fiecare cu mișcarea sa definită într-o direcție specială. Robotul liniar poate fi un robot mobil cu roți cu o bază fixă, un robot mobil cu picioare cu mai multe corpuri rigide interconectate prin articulații.
Următorul pas implică definirea cinematicii robotului. Analiza cinematică a robotului implică descrierea mișcării sale față de un sistem de coordonate fix. Este preocupat în principal de mișcarea robotului și de mișcarea fiecărui corp în cazul unui robot cu picioare. În general, implică dinamica mișcării robotului. Întreaga traiectorie a robotului este setată folosind analiza kinematică. Acest lucru se poate face folosind software-ul Workspace.
Controlul robotului este cel mai important aspect al funcționării acestuia. Aici termenul de control se referă la controlul mișcării robotului, adică controlul mișcării roților. Un robot de linie de bază urmărește o anumită cale și mișcarea robotului de-a lungul acestei căi este controlată prin controlul rotației roților, care sunt plasate pe arborii celor două motoare. Deci, controlul de bază se realizează prin controlul motoarelor. Circuitele de control implică utilizarea senzorilor pentru a detecta calea și microcontrolerul sau orice alt dispozitiv pentru a controla funcționarea motorului prin intermediul driverelor motorului, pe baza ieșirii senzorului.
2 moduri de a controla o linie Follower Robot
- Fără a utiliza microcontrolere

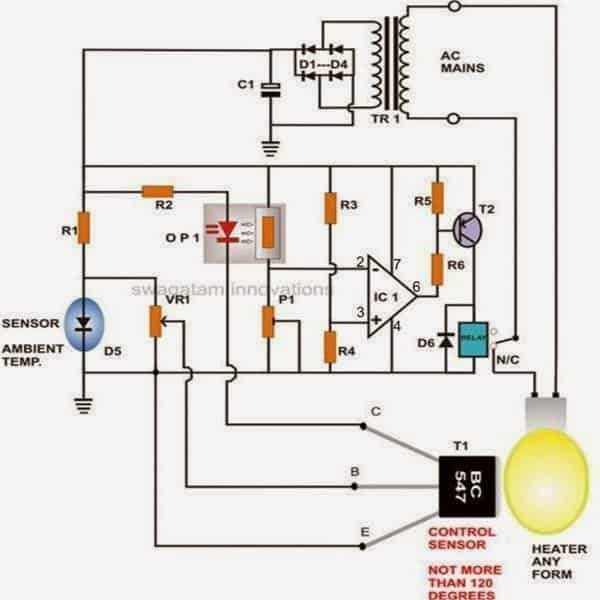
Diagrama bloc a sistemului de control
Se compune dintr-un aranjament IR-LED și fotodiodă pentru fiecare motor care este controlat de pornirea și oprirea tranzistorului.
LED-ul IR la obținerea unei polarizări adecvate emite lumină infraroșie. Această lumină IR este reflectată în cazul unei suprafețe albe, iar lumina IR reflectată este incidentă pe fotodiodă. Rezistența fotodiodei scade, ceea ce duce la o creștere a curentului prin ea și astfel la căderea de tensiune peste ea. Fotodioda este conectată la baza tranzistorului și, ca urmare a tensiunii crescute în fotodiodă, tranzistorul începe să conducă și astfel motorul conectat la colectorul tranzistorului primește suficientă sursă pentru a începe să se rotească. În cazul unei culori negre pe calea întâlnită de unul dintre aranjamentele senzorului, lumina IR nu este reflectată și fotodioda oferă mai multă rezistență, determinând tranzistorul să oprească conducerea și, în cele din urmă, motorul se oprește din rotire.
Astfel, întregul sistem poate fi controlat folosind un aranjament simplu LED-fotodiodă-tranzistor.
- Cu utilizarea microcontrolerelor
Principiul de funcționare:
Robotul în linie este unul dintre roboții care se auto-operează. Acest lucru detectează și nu urmărește o linie trasată pe zonă. Linia este indicată prin linie albă pe o suprafață de bloc sau linie de bloc pe o suprafață albă. Acest sistem trebuie să aibă sens prin linie. Această aplicație depinde de senzori. Aici folosim doi senzori în scopul detectării căii. Acesta este senzorul de proximitate și senzorul IR. Senzorul de proximitate utilizat pentru detectarea căii și senzorul IR utilizat pentru detectarea obstacolelor. Acești senzori montați la capătul frontal al robotului. Microcontrolerul este un dispozitiv inteligent, întregul circuit este controlat de microcontroler.

Diagrama bloc a liniei care urmează vehiculul robotizat cu microcontroler
Diferite tipuri de vehicule robotizate controlate de linie:
Există două tipuri de vehicule robotizate controlate de linie
- Vehicul robotizat controlat de linie mobilă
- Vehicul robotizat controlat de linie bazat pe RF
Aplicații ale robotului de linie:
- Aplicații industriale : Acești roboți pot fi folosiți ca transportatori automatizați de echipamente în industrii care înlocuiesc benzile transportoare tradiționale.
- Aplicații auto : Acești roboți pot fi folosiți și ca mașini automate alergând pe drumuri cu magneți încorporați.
- Aplicații interne : Acestea pot fi folosite și la case în scopuri casnice, cum ar fi curățarea podelei etc.
- Aplicații de îndrumare : Acestea pot fi utilizate în locuri publice, cum ar fi centre comerciale, muzee, etc. pentru a oferi îndrumări de cale.
Avantaje:
- Mișcarea robotului este automată
- Este utilizat pentru aplicații pe distanțe lungi
- Simplitatea construirii
- Montează și uită sistemul
- Se utilizează în automatizări de uz casnic, industriale etc.